результатам геометрического и кинематического анализа прототипов выбираем один прототип и для него производим силовой расчёт, выбираем двигатель и проводим кинематическое исследование машинного агрегата.
В качестве исходных данных заданы технические характеристики механизма:
· Длина зуба нарезаемого колеса 0.06 м,
·
Коэффициент изменения средней
скорости ![]() ,
,
·
Число оборотов кривошипа ![]() ,
,
·
Максимальная сила резания ![]()
·
Перебег резца ![]()
Массы
звеньев ![]() , где погонная
масса
, где погонная
масса ![]() .
.
Коэффициент
неравномерности ![]() .
.
Радиус долбяка равен длине кривошипа.
Кроме того, задана индикаторная диаграмма, показывающая зависимость величины усилия на рабочее звено от хода рабочего звена.
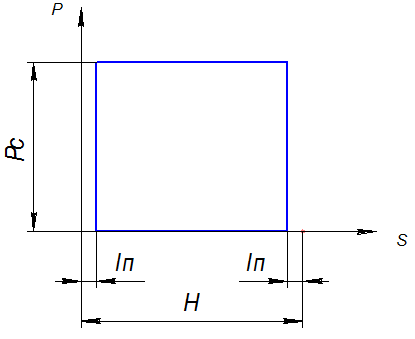 |
Рис.I.1. Индикаторная диаграмма.
При нарезании блочных колес и колес с буртами, колес с внутренними зубьями, зубчатых секторов обработка зубодолблением является единственно возможным методом обработки. Во всех других случаях выбор метода обработки зубчатых колес подтверждается технико-экономическим расчетом.
Зубчатые колёса долбят на специальных зубодолбёжных станках с применением специальных долбяков. Зубодолбёжный долбяк представляет из себя зубчатое колесо, снабжённое режущими кромками. Поскольку срезать сразу весь слой металла обычно невозможно, обработка производится в несколько этапов. При обработке инструмент совершает возвратно-поступательное движение относительно заготовки. После каждого двойного хода, заготовка и инструмент поворачиваются относительно своих осей. Таким образом, инструмент и заготовка как бы "обкатываются" друг по другу. После того, как заготовка сделает полный оборот, долбяк соврешает движение подачи к заготовке. Этот процесс происходит до тех пор, пока не будет удалён весь необходимый слой металла.
Для создания движения резания долбяк получает возвратно-поступательное движение в направлении, параллельном оси обрабатываемого колеса. Скорость перемещения долбяка является скоростью резания.
Для того , чтобы спроектировать механизм, необходимо сначала выбрать прототип будущего зубодолбежного станка, а затем провести синтез по выбранным критериям с целью получения механизма, соответствующего техническому заданию. В качестве критериев синтеза выберем следующее:
1) Максимальный
ход рабочего звена ![]() .
.
Данный критерий определяется разностью максимального и минимального положений рабочего звена (в данном случае левого и правого).
2) ![]()
Критерий, характеризующий внешние условия передачи сил в механизме;
3) ![]()
Критерий, характеризующий внутренние условия передачи сил в механизме.
4) ![]()
Коэффициент изменения средней скорости. Определяется, как отношение рабочего хода к холостому.
5) Габариты механизма.
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация последних, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп -кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
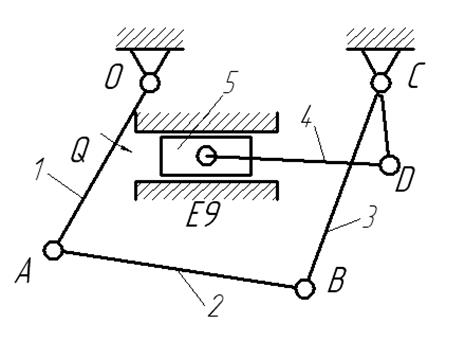
Рис.II.1. Кинематическая схема механизма.
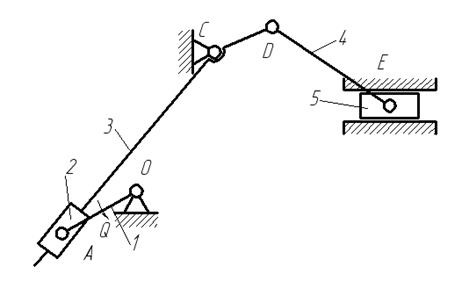
Рис.II.2. Кинематическая схема механизма.
Структурный анализ механизмов смотрите в курсовой работе «Кинематический и силовой анализ рычажных механизмов».
Выбраны следующие размеры:
Таблица II.1
|
Прототип №1 |
Прототип №2 |
||
|
ОА |
0.082 |
OA |
0.073 |
|
AB |
0.108 |
XC |
0.067 |
|
BC |
0.093 |
YC |
0.119 |
|
XC |
0.098 |
X3D |
-0.048 |
|
X3D |
0.031 |
Y3D |
0.024 |
|
Y3D |
0.016 |
DE |
0.121 |
|
DE |
0.078 |
YE |
0.073 |
|
YE |
-0.031 |
OM |
2 |
|
OM |
2 |
||
Для сравнения прототипов воспользуемся следующими критериями синтеза:
Габаритный размер.
Для определения габаритных размеров построим планы 12-ти положений (их схематическое изображение приведено в приложении 1, а точный вид в масштабе - на первом листе А1). Длину определяем как разницу между максимальным и минимальным значениями координаты X, а высоту как разницу между максимальным и минимальным значениями координаты Y.
Максимальный ход рабочего звена. (Hmax)
Коэффициент К1.
Характеризует внешние условия передачи сил
![]()
,где ![]() - аналог скорости
ползуна,
- аналог скорости
ползуна,
![]() - длина кривошипа.
- длина кривошипа.
Обычно ![]() .
.
Коэффициент К2.
Характеризует относительный уровень реакций в механизме
![]()
,где ![]() – величина угла
давления.
– величина угла
давления.
Обычно ![]()
Коэффициент Кv.
Коэффициент изменения средней скорости. Определяется как отношение рабочего хода к холостому.
Чем меньше эти коэффициенты, тем лучше механизм.
Составим таблицу сравнения:
Таблица II.2

В результате сравнения прототипов по выбранным критериям можно сделать первоначальные выводы о том, какой из прототипов более подходит. Габариты у первого прототипа меньше, но зато коэффициенты K1 и K2 меньше у второго прототипа, следовательно прототип второй наиболее приемлем для дальнейших расчетов.
Целью геометрического анализа рычажного механизма является составление уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функций положения выходных звеньев структурных групп.
Целью геометрического анализа является определение функций положения механизма – зависимостей выходных координат, определяющих положения его звеньев, от заданных входных координат.
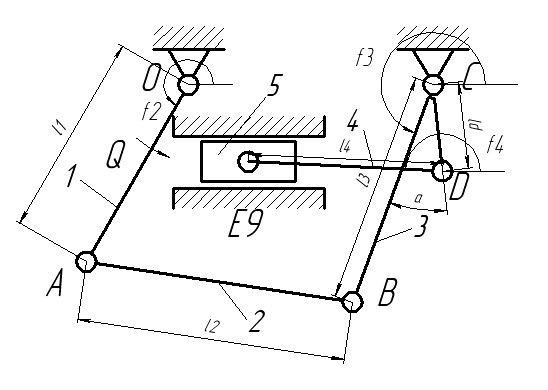
Рис.III.1. Кинематическая схема механизма.
Уравнения геометрического анализа.
Кривошип:
![]()
1-я группа ВВП:

2-я группа ВВП:
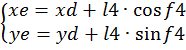
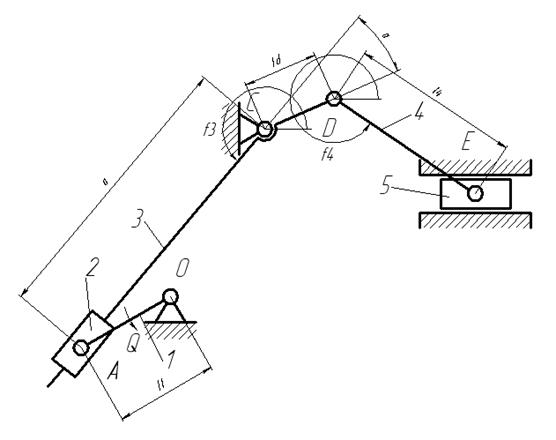
Рис.III.2. Кинематическая схема механизма.
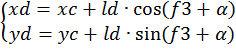
Уравнения геометрического анализа.
Кривошип:
|
|
|
|
Система не имеет неизвестных, так как координаты точки А полностью определяются за счет входной координаты q.
1-я группа ВВП:
|
|
|
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
2-я группа ВВП:
|
|
|
|
Решение групповых уравнений и нахождение соответствующих углов смотрите в приложении-1 в MathCAD.
В результате геометрического анализа механизма были найдены линейные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.