Для построения АФЧХ на комплексной плоскости
необходимо в уравнении передаточной функции выделить действительную и мнимую
части, для этого числитель и знаменатель последнего выражения умножаем на
сопряженное число знаменателю, т.е. на ((75×w2 –
3000) – j×(8×w3 – 550×w)). При расчетах помним, что j = ![]() ; j2 = -1; j3 = -j.
; j2 = -1; j3 = -j.
W(jw) =  =
=
= =
=
=  .
.
Вместо j в формулу подставляем j = ![]() ; j2 = -1, получим:
; j2 = -1, получим:
W(jw)= .
.
Модуль:
A(w)
=![]() ;
;
 |
Аргумент:
j(w) = ,
,
где Re(W(jw)) – действительная часть частотной передаточной функции; Im(W(jw)) – мнимая часть частотной передаточной функции.
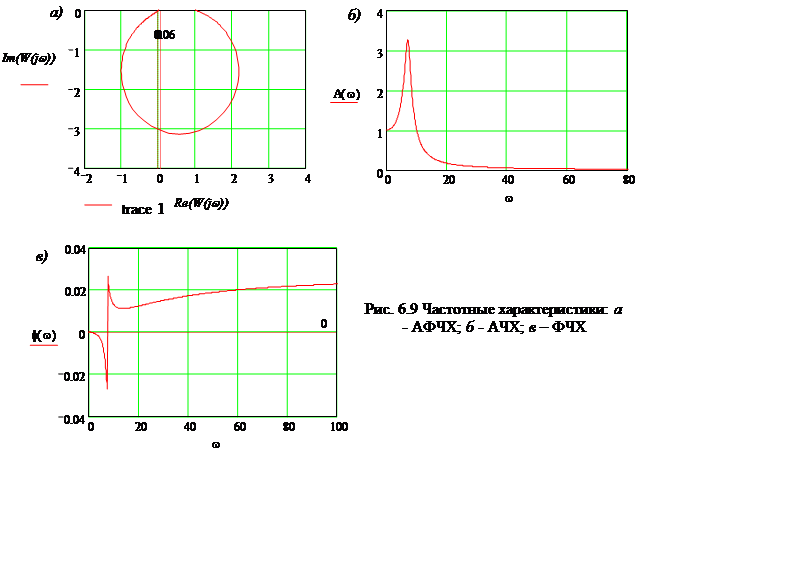
Подставим числовые значения частоты w = 0, 0.1,..1000, выполним расчеты и построим частотные характеристики АФЧХ, АЧХ, ФЧХ (рис. 6.9). Расчеты и построение графиков выполнено в программе MATHCAD.
Используя данные задания 1, провести анализ устойчивости системы, с помощью одного из алгебраических критериев устойчивости и одного из частотных. Если система неустойчива, то определить пути достижения устойчивости.
Характеристическое уравнение разомкнутой системы по задающему воздействию X(p) (знаменатель передаточной функции, смотри задание 2):
D(p) = 0,048p3 + 0,45p2 + 3,3p + 18 = 0,
где a0 = 0,048; a1 = 0,45; a2 = 3,3; a3 = 18.
Составим матрицу:
 =
= 
Условия устойчивости:
a0 > 0; a1 > 0; a2 > 0; a3 > 0; D2 = a1a2 – a0a3 > 0.
Проверим выполнение этих условий.
a0 = 0,048 > 0; a1 = 0,45 > 0; a2 = 3,3 > 0; a3 = 18 > 0.
Выразим определители Гурвица:
 .
.
Вывод: Условие D2 > 0 выполняется, следовательно, система устойчива в разомкнутом состоянии по задающему воздействию.
Анализ устойчивости системы этим методом сводится к построению по характеристическому многочлену замкнутой системы (знаменатель передаточной функции) комплексной частотной функции. Запишем знаменатель передаточной функции замкнутой системы по задающему воздействию (см. задание 2).
D(p) = (А1p2 + А2p + А3)×(A4p + A5) + (B1p + B2)×B5p + (B1p + B2) × (B2p + B4) =
= (0,06p2 + 0,1p +3)×(0,8p + 6) + (0,1p +3)×0,1p + (0,1p + 3)×(0,8p + 6).
Обозначим: p = jw, запишем:
D(jw) =(0,06× (j×w)2 + 0,1× (j×w) +3)×(0,8× (j×w) + 6) + (0,1× (j×w) +3)×0,1× (j×w) +
+ (0,1× (j×w) + 3)×(0,8× (j×w) + 6).
Так как j = ![]() ; j2 = -1; j3 = -j, то с
учетом этого получим:
; j2 = -1; j3 = -j, то с
учетом этого получим:
D(jw) = -0,048×j×w3 – 0,53×w2 + 6,3× j×w +36;
Выделим действительную и мнимую часть комплекснозначной функции:
D(w) = (- 0,53×w2+36 )+ j× (6,3×w – 0,048×w3);
D(w) = u(w) + j× v(w);
u(w) = Re(D(w)); v(w) = Im (D(w))
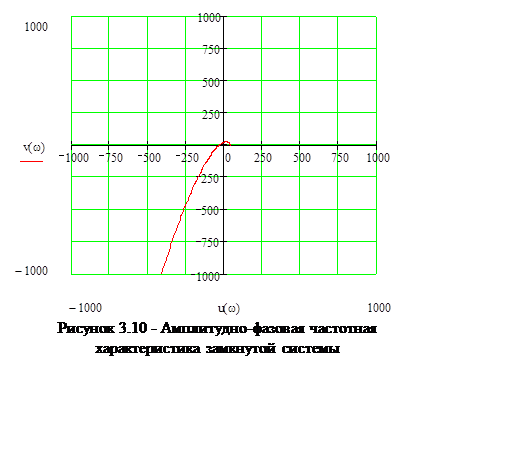 |
Вывод: система автоматического управления в замкнутом состоянии устойчива, так как годограф Михайлова при изменении частоты w от нуля до бесконечности, начинаясь при w = 0 на вещественной положительной полуоси, обходит последовательно только против часовой стрелки три квадранта координатной плоскости (так как порядок характеристического уравнения третий), и уходит в бесконечность в третьем квадранте координатной плоскости.
Используя данные задания 1 и приняв f(t) = 0, определить значения установившейся ошибки системы.
Найдём значение установившейся ошибки, принимая p = 0:
Кзамк. = Wзамк.XY(0) = 18/36 = ½;
Kраз = WразXY (0) = 18/18 = 1.
Ошибка:
E =  ;
;
E = ½.
1. Содержание понятий: «система», «регулирование», «управление», «объект управления», «управляемая величина», «возмущающее воздействие», «координата». Два рода операций в производственном процессе: рабочие операции, операции управления.
2. Основные принципы управления.
3. Блок-схема системы автоматического управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.