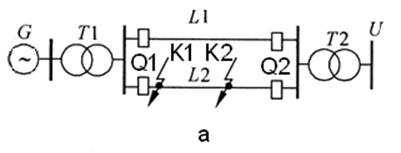
Наиболее распространенным видом возмущения, приводящим к необходимости анализа динамической устойчивости, является короткое замыкание. Рассмотрим общий случай несимметричного КЗ в начале линии L2 (точка К1 на рисунке 3.2,а). Схема замещения системы для режима короткого замыкания показана на рисунке 3.2,б.
|
|
|
|
Рисунок 3.2 – Короткое замыкание в простейшей системе: а - принципиальная схема; б - схема замещения для режима КЗ в точке К1 |
|
В точке К1 включено шунтирующее
сопротивление КЗ ![]() состоящее из суммарных
сопротивлений обратной хå2 и нулевой хå0
последовательностей, определенных по тем же правилам, что и для расчета токов
несимметричного КЗ. После возникновения КЗ мощность, передаваемая от генератора
в систему, изменится, как и суммарное сопротивление хå1, связывающее
генератор с системой.
состоящее из суммарных
сопротивлений обратной хå2 и нулевой хå0
последовательностей, определенных по тем же правилам, что и для расчета токов
несимметричного КЗ. После возникновения КЗ мощность, передаваемая от генератора
в систему, изменится, как и суммарное сопротивление хå1, связывающее
генератор с системой.
Это сопротивление может быть найдено из схемы замещения (рисунок 3.2,б) следующим образом [1]:
 . (3.2)
. (3.2)
Сопротивления хå2 и хå3 находятся по аналогичным выражениям преобразования звезды в треугольник, но они не влияют на значение мощности генератора в аварийном режиме и могут не учитываться. Подставив сопротивление хå1 в выражение характеристики мощности (3.1), получим синусоиду, лежащую ниже характеристик нормального и послеаварийного режимов. Это объясняется увеличением сопротивления хå1.
В момент КЗ из-за изменения параметров схемы происходит переход с одной характеристики мощности на другую (рисунок 3.3).
Так как ротор обладает определенной инерцией, то угол d мгновенно измениться не может и отдаваемая генератором мощность уменьшается до значения Р(о). Мощность турбины при этом не изменяется ввиду запаздывания ее регуляторов. На валу турбина-генератор возникает некоторый избыточный момент, определяемый избытком мощности (DР = Ро - Р(о)). Под влиянием этого момента ротор генератора начинает ускоряться, угол d увеличивается. Качественно процесс протекает так же, как в предыдущем случае внезапного отключения линии. Поскольку линия L2, как и любой другой элемент системы электроснабжения, имеет защиту, через определенное время tоткл она (линия) отключится выключателями Q1 и Q2.
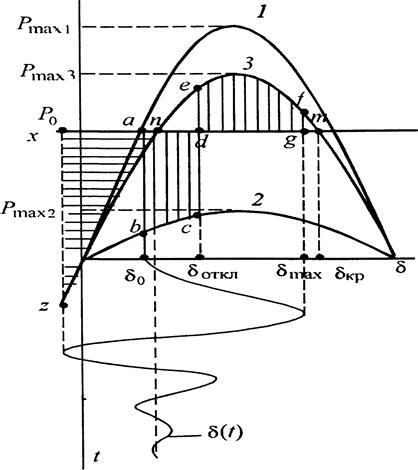
Рисунок 3.3 – Динамический переход при несимметричном КЗ
Времени tоткл соответствует угол отключения КЗ dоткл. Отключение КЗ вызывает переход с характеристики мощности аварийного режима 2 на характеристику послеаварийного режима 3. При этом избыточный момент меняет знак, превращаясь из ускоряющего в тормозящий. Ротор, тормозясь, продолжает движение в сторону увеличения угла из-за накопленной в процессе ускорения кинетической энергии. Это движение будет продолжаться до тех пор, пока площадь торможения fdefg не станет равной площади ускорения fabcd. В точке fскорость ротора становится синхронной. Но движение ротора не прекращается, так как на него действует тормозной избыточный момент, определяемый избытком мощности DРторм = Рf - Ро. Ротор, ускоряясь, начинает движение в обратную сторону. Его скорость максимальна в точке п. После точки п относительная скорость начинает уменьшаться и становится равной нулю в точке z. Эта точка определяется из равенства площадок fnefgdи fxnz. Из-за потерь колебания ротора будут затухать около нового положения равновесия послеаварийного режима – точки п.
Из рисунка 3.3 можно найти предельное значение угла отключения КЗ, при котором устойчивая работа системы сохраняется. Оно определяется равенством площади ускорения fabcdи возможной площади торможенияfdefm. Приравнивая к нулю разность этих площадей, получаем аналитическое выражение для предельного угла отключения КЗ:

Раскрывая определенные интегралы, запишем

Откуда

|
(в (3.3) все углы выражены в радианах).
Однако для практических целей знания угла dоткл.прнедостаточно. При выборе выключателей и расчете релейной защиты необходимо знать не угол, а период времени, в течение которого ротор успевает достигнуть этого угла, т.е. предельно допустимое время отключения КЗ. Это время может быть определено решением уравнения движения ротора генератора известными методами решения дифференциальных уравнений (например, методом Рунге-Кутта четвертого порядка или методом последовательных интервалов).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.