













Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение высшего
профессионального образования
«Комсомольский-на-Амуре государственный технический университет»
Кафедра «Механика и анализ конструкций и процессов»
РАСЧЁТ СТАТИЧЕСКИ НЕПРЕДЕЛИМЫХ ПЛОСКИХ РАМ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Методические указания к выполнению контрольной и расчётно-проектировочной работы по строительной механике
![]()
Комсомольск-на-Амуре 2009
![]()
Расчёт статически неопределимых плоских рам методом перемещений: Методические указания по курсу «Строительная механика» / Сост. В.С. Симонов, Г.С. Лейзерович – Комсомольск-на-Амуре: ГОУВПО «Комсомольский-на-Амуре государственный технический университет», 2009.
– 17 с.
Методические указания содержат рекомендации по реализации метода перемещений для раскрытия статической неопределимости плоских рам.
Приведен пример расчёта трижды кинематически неопределимой (дважды статически неопределимой) плоской рамы. Решение примера сопровождается необходимыми рисунками и комментариями.
Методические указания предназначены для студентов заочной и дневной форм обучения, изучающих курс «Строительная механика».
![]() Печатается
по постановлению редакционно-издательского совета ГОУВПО
«Комсомольский-на-Амуре государственный технический университет».
Печатается
по постановлению редакционно-издательского совета ГОУВПО
«Комсомольский-на-Амуре государственный технический университет».
Согласовано с отделом стандартизации.
Рецензент Ю.Н. Чудинов
ВВЕДЕНИЕ
Метод перемещений, как и метод сил, является универсальным (классическим) методом расчёта статически неопределимых стержневых систем. Следует, однако, заметить, что раскрытие статической неопределимости производится через раскрытие кинематической неопределимости, т.е. в качестве неизвестных принимаются не усилия, как в методе сил, а перемещения некоторых (характерных) узлов стержневой системы.
Так же, как и в методе сил, вводятся понятия основной (ОС) и эквивалентной (ЭС ) систем, но принцип их образования из заданной системы (ЗС) принципиально другой. Условия эквивалентности также имеют другой физический (механический) смысл. Теоретические основы метода перемещений рассмотрены в [ ].
Особенности метода перемещений и его применение к расчёту плоских статически неопределимых рам покажем ниже на конкретном примере. В качестве примера рассмотрим ту же раму, что и в методических указаниях «Расчёт плоских статически неопределимых рам методом сил».
1. РАСЧЁТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ ПЛОСКОЙ РАМЫ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Раскрыть статическую (кинематическую) неопределимость (рис. 1) и построить эпюру изгибающих моментов
Рис.1 Расчётная схема рамы
Решение выполняем в такой последовательности.
1) Определяем число неизвестных метода перемещений.
Общее число неизвестных находим как сумму неизвестных угловых перемещений nу,равных общему числу жёстких узлов, и независимых линейных перемещений nлвсех узлов, равных степени свободы преобразованной шарнирной схемы рамы.
Заданна рама имеет два жёстких узла – 3 и 5, т.е. nу=2.
Шарнирную схему рамы получим из заданной введением шарниров во все жёсткие узлы и заменой жёстко защемлённой опоры шарнирно неподвижной (рис.2).
Рис.2. Преобразованная шарнирная схема рамы
Степень свободы шарнирной схемы рамы вычислим по формуле
![]() .
.
Число дисков равно числу стержней, т.е. D=4. Приведенное число шарниров (простых шарниров) Ш=3 (один в узле 3 и два – в узле 5). Число опорных связей СО=5. Тогда
nл=w=3·4 -2·3 -5=1.
Этим неизвестным перемещением является горизонтальное перемещение, одинаковое для узлов 3,5,6.
Таким образом, общее число неизвестных (степень кинематической неопределимости)
![]() .
.
2) Образуем основную систему (ОС), введя в жёсткие узлы «плавающие» заделки (угловые связи), а в узел 6 – линейную горизонтальную связь, запрещающие возможные перемещения узлов рамы. Отметим, что «плавающая» заделка отличается от обычной жёсткой тем, что она препятствует только лишь повороту узла и не лишает его линейной подвижности.
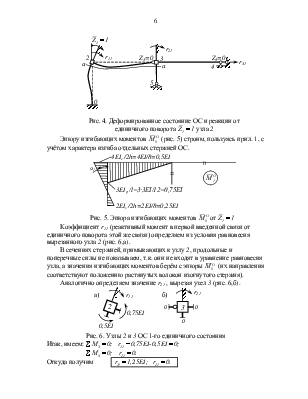
3) Загрузив ОС заданной нагрузкой и указав предполагаемые направления неизвестных перемещений Z1, Z2, Z3, получим эквивалентную систему (ЭС) метода перемещений (рис. 3). Заметим, что это условно эквивалентная система, т.к. она изображена в недеформированном виде.
Рис.3. Эквивалентная система
4) Записываем систему канонических уравнений метода перемещений, выражающих условия отсутствия реакций в дополнительно наложенных связях – условия эквивалентности ЗС и ЭС.
![]() r11Z1+r12Z2+r13Z3+R1P=0;
r11Z1+r12Z2+r13Z3+R1P=0;
r21Z1+r22Z2+r23Z3+R2P=0;
r31Z1+r32Z2+r33Z3+R3P=0.
Здесь:
rij (i=1,2,3; j=1,2,3)
– реактивное усилие в i-ой
дополнительно введенной связи, вызванное единичным перемещением ![]() j-ой дополнительно
введенной связи; RiP – реактивное усилие в i-ой связи,
вызванное заданной внешней нагрузкой.
j-ой дополнительно
введенной связи; RiP – реактивное усилие в i-ой связи,
вызванное заданной внешней нагрузкой.
Реакции rij, RiРимеют положительный знак в том случае, когда их направления совпадают с принятым направлением Zi.
Реакции rij= rjiв силу теоремы о взаимности реакций (аналогично теореме о взаимности перемещений δij= δji – см. метод сил).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.