число геометрических связей, наложенных на механическую систему;
g = 0 - число дифференциальных связей, наложенных на механическую систему.
Ограничения на абсолютные или взаимные положения либо скорости в рассматриваемой механической системе сводятся к запрещению перемещений точки О оси цилиндрического шарнира по двум взаимно перпендикулярным направлениям. Таким образом, геометрических связей две (d = 2), а дифференциальные связи отсутствуют (g= 0). Рассматриваемая механическая система является голономной и имеет одну степень свободы
n = 1.
Для голономной системы число обобщенных координат, однозначно определяющих положение механической системы, равно числу степеней свободы. В качестве обобщенной координаты примем угол поворота φ инерционного элемента 1 (см. рис. 1.2), отсчитываемый от положения статического равновесия,
q = φ.
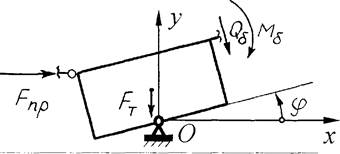
Рисунок 1.3 - Усилия, действующие на инерционный элемент
при его малом положительном отклонении
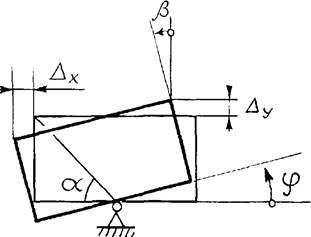
Рисунок 1.4 - Обозначения перемещений при малом положительном
отклонении инерционного элемента
2 Условие динамического равновесия
Поскольку рассматриваемое твердое тело имеет неподвижную ось вращения (ось z), то необходимым и достаточным условием его равновесия является следующее условие, связывающее активные силы:
![]() = 0. (1.1)
= 0. (1.1)
Согласно принципу Даламбера любая система сил, приложенных к твердому телу, удовлетворяет условиям равновесия, если к этим силам добавить силы инерции. С учетом моментов сил инерции условие динамического равновесия рассматриваемого тела примет вид
![]() = 0. (1.2)
= 0. (1.2)
Здесь ![]() и
и ![]() - моменты
относительно оси z, проходящей через точку О, активных
сил и сил инерции соответственно.
- моменты
относительно оси z, проходящей через точку О, активных
сил и сил инерции соответственно.
3 Уравнение движения
Условие
(1.2) динамического равновесия является, по существу, неявной формой записи
дифференциального уравнения движения рассматриваемого тела. Чтобы перейти к
явной форме, необходимо выразить входящие в него величины через обобщенную
координату φ и ее производные. Для этого выведем механическую систему из
положения статического равновесия, придав инерционному элементу некоторый
положительный угол поворота φ и малую положительную скорость ![]() . Отбросим взаимодействующие с
инерционным элементом 1 пружину 2, упругую балку 3 (см.
рисунок 1.2) и заменим их действие силовыми факторами Fпр, Qб, Мб (рисунок 1.3). Тогда условие (1.2)
динамического равновесия будет иметь вид
. Отбросим взаимодействующие с
инерционным элементом 1 пружину 2, упругую балку 3 (см.
рисунок 1.2) и заменим их действие силовыми факторами Fпр, Qб, Мб (рисунок 1.3). Тогда условие (1.2)
динамического равновесия будет иметь вид
Mz(Fnp) + Mz(Qб) + Mz(Mб) + Mz(FT) + ![]() = 0. (1.3)
= 0. (1.3)
Здесь в левой части стоят моменты относительно оси zсилы пружины, поперечной силы балки , изгибающего момента, силы тяжести и сил инерции соответственно.
Величину и направление сил Fnp, Qб, Мб определим в предположении малости отклонения инерционного элемента от положения статического равновесия. Пружина 2 при повороте инерционного элемента I против часовой стрелки (рисунок 1.4) укорачивается на величину
 .
.
Для б = р/4 получаем Δх =lφ. Такое деформирование упругого элемента приводит к возникновению в нем упругой силы:
Fnp = CΔх = Clφ.
Момент этой силы относительно оси z:
M(Fnp) = –Fnpl(l – sin φ). (1.4)
Знак «–» в правой части поставлен потому, что сила Fnpстремится повернуть элемент 1 по часовой стрелке, т.е. знак момента противоположен знаку угла φ.
Действующие со стороны упругой балки сила Qби момент Мб обусловлены поворотом β и вертикальным отклонением Δу сечения, соответствующего креплению балки 3 к инерционному элементу 1 (см. рисунок 1.2 и 1.3). Величины поперечной силы Qби изгибающего момента М6 в заделке, вызванные монтажными перемещениями β и Δу, получим, используя расчетную схему один раз статически неопределимой балки (рисунок
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




