






Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Омский государственный технический университет
Кафедра: «ЭсПП»
Дисциплина: «Электропривод»
Отчёт по лабораторной работе №4
МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА С (П и ПИ) – РЕГУЛЯТОРАМИ СКОРОСТИ И ОДНОФАЗНЫМ ПОЛНОСТЬЮ УПРАВЛЯЕМЫМ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ
Вариант №6
Выполнил: студент группы Э – 414
Хапилин Д.В.
Проверил: к.т.н., старший преподаватель
Катрич П.А.
Омск 2008
Цель работы: изучение принципа действия, статических и динамических свойств тиристорного электропривода с П и ПИ – регуляторами скорости.
ОПИСАНИЕ ИССЛЕДУЕМЫХ ЭЛЕКТРОПРИВОДОВ.
Структурная схема электропривода приведена на рис. 1.
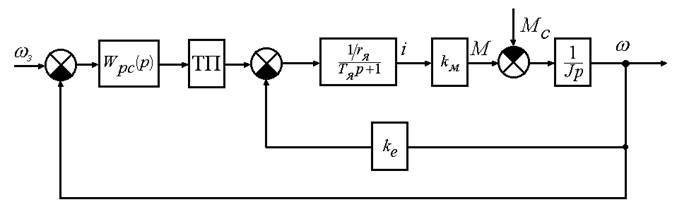 |
Здесь
![]() – сопротивление и ток якорной цепи;
– сопротивление и ток якорной цепи;
![]() – угловая
скорость вала двигателя;
– угловая
скорость вала двигателя;
![]() – момент
нагрузки;
– момент
нагрузки;
![]() –
электромагнитная постоянная времени;
–
электромагнитная постоянная времени;
![]() –
конструктивный коэффициент;
–
конструктивный коэффициент;
![]() – заданная
скорость двигателя;
– заданная
скорость двигателя;
![]() –
передаточная функция регулятора скорости;
–
передаточная функция регулятора скорости;
![]() – в случае
П-регулятора;
– в случае
П-регулятора;
 –
в случае ПИ-регулятора;
–
в случае ПИ-регулятора;
ТП – тиристорный преобразователь.
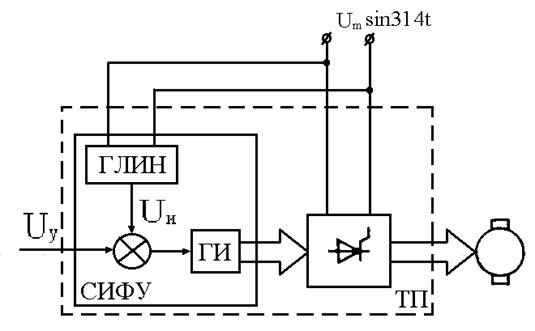 |
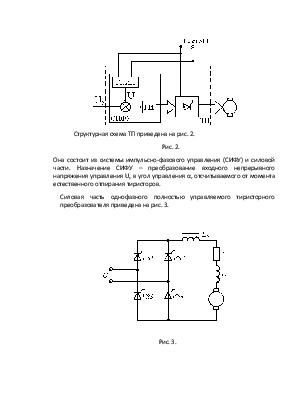
Рис. 2.
Она состоит из системы импульсно-фазового управления (СИФУ) и силовой части. Назначение СИФУ – преобразование входного непрерывного напряжения управления Uу в угол управления α, отсчитываемого от момента естественного отпирания тиристоров.
Силовая часть однофазного полностью управляемого тиристорного преобразователя приведена на рис. 3.
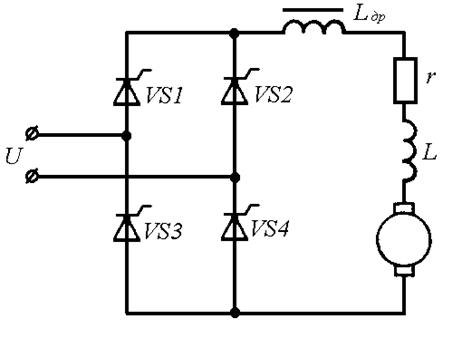 |
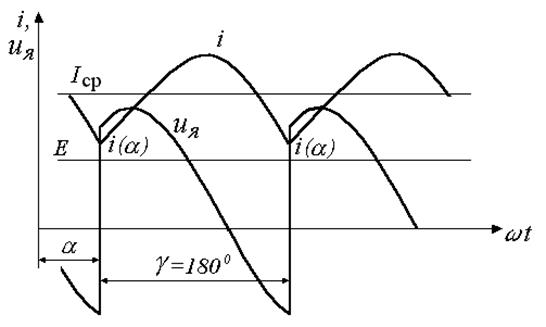 |
Рис. 4.
Здесь α – угол управления, γ=1800 – угол проводимости тиристоров.
Среднее значение выходного напряжения за период (рис. 4)
 ,
(1)
,
(1)
где Um – амплитуда выходного напряжения вторичной обмотки силового трансформатора.
Тогда
при α=00 величина  , при α=900
– Uср=0.
, при α=900
– Uср=0.
Отсюда
видно, что для осуществления пропорциональной зависимости между напряжением
управления и величиной Uср
необходимо обеспечить: при Uу=0 угол
управления α должен быть  , при Uy=Uи.max величина α=00.
Такое соотношение между Uy и α можно выполнить применением ГЛИН с формой
выходного напряжения Uи,
показанной на рис. 5.
, при Uy=Uи.max величина α=00.
Такое соотношение между Uy и α можно выполнить применением ГЛИН с формой
выходного напряжения Uи,
показанной на рис. 5.
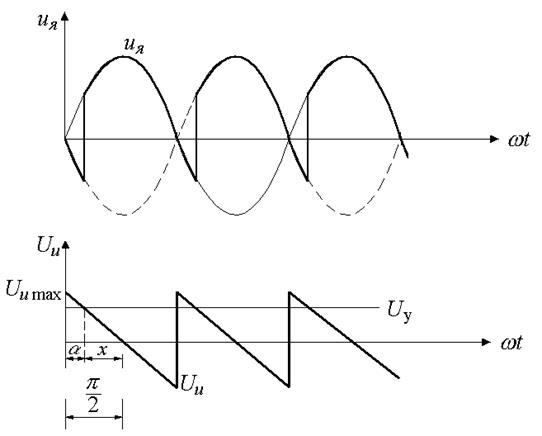 |
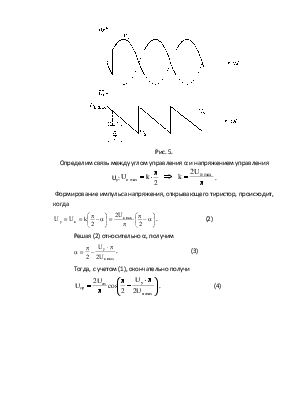
Определим связь между углом управления α и напряжением
управления Uy:
![]()
 .
.
Формирование импульса напряжения, открывающего тиристор, происходит,
когда
 .
(2)
.
(2)
Решая (2) относительно α, получим
 .
(3)
.
(3)
Тогда, с учетом (1), окончательно получи
 .
(4)
.
(4)
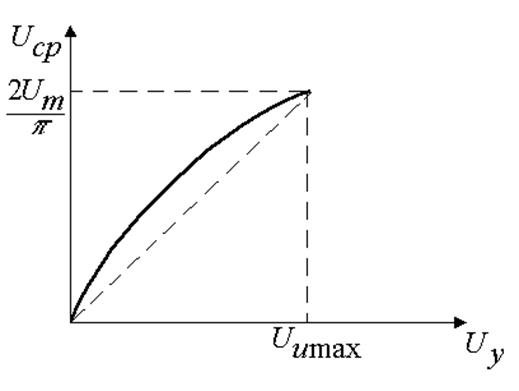 |
Рис. 6.
Возможна грубая линеаризация нелинейной характеристики. В этом случае принимают
![]() ,где
,где  (5)
(5)
– коэффициент передачи ТП.
Найдем
амплитуду выходного напряжения вторичной обмотки трансформатора, необходимую
для обеспечения вращения вала двигателя в заданном диапазоне скорости ![]() и момента сопротивления
и момента сопротивления ![]() . Тогда среднее значение за период
выходного напряжения ТП:
. Тогда среднее значение за период
выходного напряжения ТП:
 .
(6)
.
(6)
Это напряжение обеспечиваются минимальным углом управления:
 .
(7)
.
(7)
Результат расчета Um по (7) зависит от интуиции проектировщика (удачного выбора αmin).
Необходимо учитывать, что тиристоры ТП могут открыться, только если величина напряжения сети больше противоЭДС двигателя
![]() .
(8)
.
(8)
Поэтому величину Um, рассчитанную на основании (7), необходимо проверить на выполнение условия (8).Возможен расчет Um без предварительной оценки величины αmin. Из (8):
 .
(9)
.
(9)
Учитывая (7), (9) и
![]() ,
,
получим:
![]() .
(10)
.
(10)
Выражение (10) позволяет определить амплитуду выходного напряжения вторичной обмотки трансформатора, достаточную для обеспечения вращения вала двигателя со скоростью ωз.max и момента сопротивления Mc.max.
Моделирование исследуемых электроприводов на ЭВМ производится с помощью приложения «Simulink» из состава программного пакета «MatLab».
 |
Рис. 7.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
1. Для заданных параметров двигателя рассчитать напряжение Um вторичной обмотки силового трансформатора (по выражению (10)), поступающего на силовую часть ТП.
![]()
Примем Uм=100 В (для ввода в модель ).
2.
Для заданной величины
максимального напряжения Uи.max рассчитать и построить график зависимости среднего
напряжения ТП от напряжения управления (по выражению ![]() ,
где kТП
определяется по
,
где kТП
определяется по
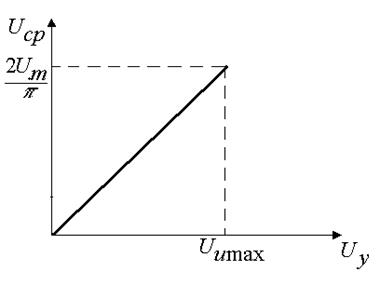 |
Рис.8.
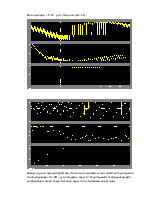
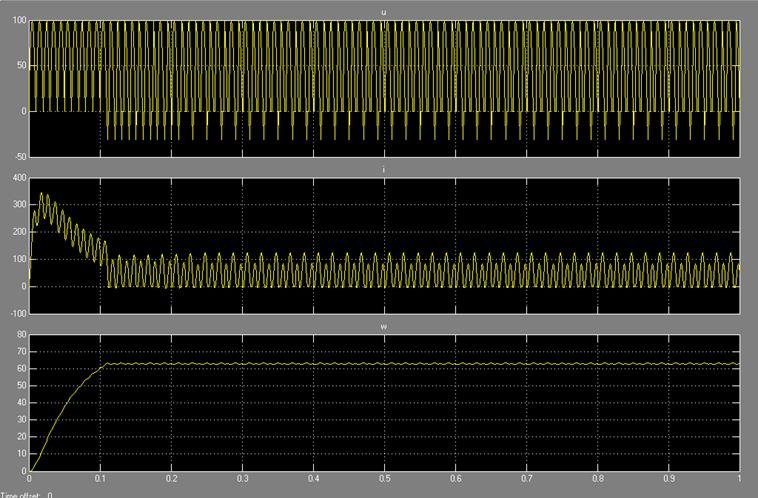
3. Для привода с П-регулятором исследуйте процессы отработки ступенчатого задающего воздействия при kpc=20,50, контролируя величины Uя(t), iя(t), ω(t). Нарисуйте графики этих величин. Определите значения максимальной величины скорости ωmax, перерегулирование σ, размах колебаний скорости в установившемся режиме Δω, время регулирования tp. Результаты занесите в таблицу 1.
Таблица 1. Исследование привода с П-регулятором.
|
Mc, Н∙м |
kpc |
ωmax, с-1 |
Δω, с-1 |
σ, % |
tp, c |
|
35 |
20 |
64 |
1 |
1,5 |
0,11 |
4. Для привода с ПИ-регулятором при заданной величине kи повторите исследования по пункту 4. Результаты занесите в таблицу 2.
Таблица 2. Исследование привода с ПИ-регулятором.
|
Mc, Н∙м |
kpc |
ωmax, с-1 |
Δω, с-1 |
σ, % |
tp, c |
|
35 |
20 |
66 |
0,5 |
0,8 |
0,125 |
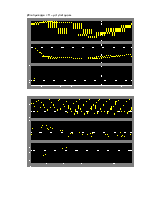
Для привода с П – регулятором.
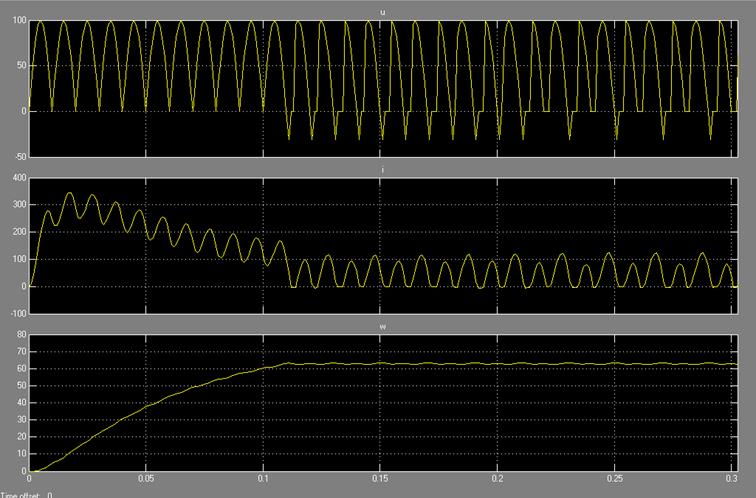
Для привода с ПИ – регулятором (Ки=20).
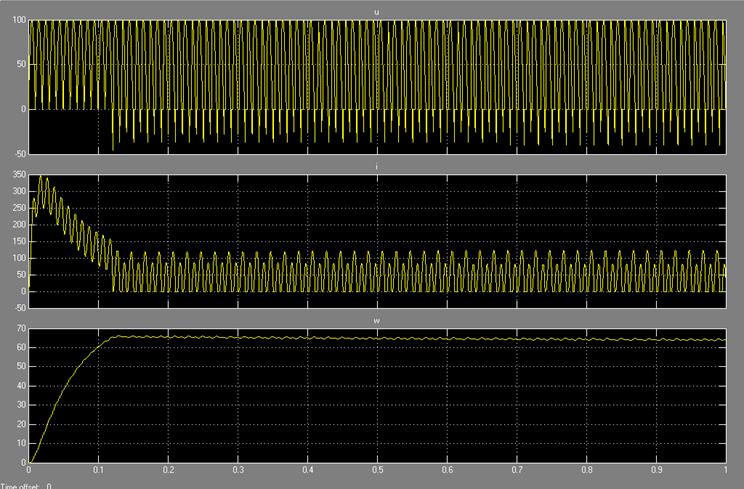
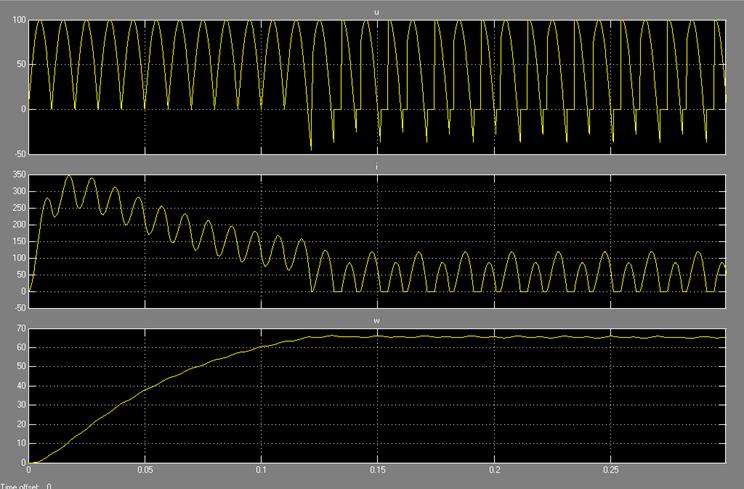
Вывод: изучили принцип действия, статические и динамические свойства тиристорного электропривода с П и ПИ – регуляторами скорости. Тиристорный электропривод даёт колебания(незначительные биения) скорости в установившемся режиме.
ЛИТЕРАТУРА.
1. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990.
2. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высшая школа, 1979.
3. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.