6. СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ
6.1.Основные понятия
6.2.Постановка задачи синтеза одноканальных систем
6.3.Условия разрешимости задачи синтеза
6.3.1.Ресурсное ограничение
6.3.2.Устойчивость “обратного” объекта
6.3.3.Вырожденность передаточной функции
6.3.4. Управляемость
6.3.5. Наблюдаемость
6.4.Частотный метод синтеза
6.4.1.Постановка задачи
6.4.2.Влияние частотной характеристики разомкнутой системы на свойства замкнутой
6.4.3.Основные соотношения и методика расчета
6.4.4.Построение ЛАЧХ объекта
6.4.5.Построение желаемой ЛАЧХ
6.4.6.Расчет корректирующего звена
6.4.7.Влияние возмущения и помехи измерения на свойства замкнутой системы
6.5.Модальный метод синтеза
6.5.1.Основные понятия
6.5.2.Постановка задачи синтеза для одноканального объекта
6.5.3.Обеспечение заданной статики
6.5.4.Расчет корректора динамики
6.5.5.Схема реализации регулятора
___________________________________________________
6.1. Основные понятия
Под синтезом будем понимать проектирование регулятора для системы автоматического управления по заданным требованиям к динамическим и статическим свойствам.
Метод синтеза зависит от конкретной технической ситуации, поэтому целесообразно классифицировать режимы работы системы, модель которой имеет вид:
|
|
(6.1) |
Процессы в ней описываются соотношением
|
|
(6.2) |
Их вызывают различные факторы, и обычно в системе протекают смешанные процессы, однако для расчета регулятора следует их различать.
|
1. Режимом отработки начальных условий будем называть процесс перехода из произвольных начальных состояний x(0) в равновесные при v =const. Первую составляющую (6.2), которая определяет этот режим работы, часто называют свободной составляющей. <> |
Риc.6.1. Иллюстрация режима |
|
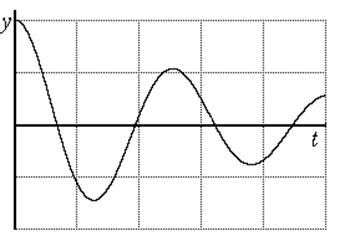
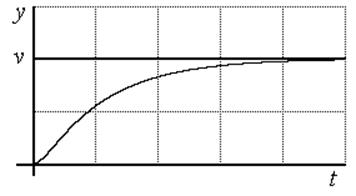
2. Режимом отработки входа будем называть процесс отработки системой скачкообразного изменения входного воздействия v(t) при нулевых начальных условиях, причем на участке переходного процесса v=const. Такому режиму работы соответствует вторая составляющая выражения (6.2). |
Риc.6.2. Иллюстрация режима |
3. Режимом слежения за входом
будем называть процесс ![]() при
v=var. Данному процессу также будет соответствовать вторая составляющая (6.2).
при
v=var. Данному процессу также будет соответствовать вторая составляющая (6.2).
4. Режимом отработки возмущений будем называть процессы, вызванные в системе возмущением M( t) при фиксированных начальных условиях и v=const. Третья составляющая (6.2) отражает процесс отработки возмущения.
Каждый режим работы системы определяет выбор конкретного метода синтеза, причем требования к качеству процессов задаются в определенной форме на основе стандартных оценок: быстродействия, перерегулирования и статической ошибки.
Так при отработке входа для
описания процессов используются следующие динамические характеристики: h(t),
g(t), W(p), W(![]() ). С их помощью
можно получить соответствующие методы синтеза. К настоящему времени наиболее
полно разработан частотный метод, основанный на логарифмических частотных
характеристиках
). С их помощью
можно получить соответствующие методы синтеза. К настоящему времени наиболее
полно разработан частотный метод, основанный на логарифмических частотных
характеристиках ![]() .
Логарифмическими называются характеристики
.
Логарифмическими называются характеристики ![]() , построенные в логарифмическом масштабе.
, построенные в логарифмическом масштабе.
Если же рассматривается режим отработки начальных условий, то в соответствии с (6.2), можно применять только модальный метод.
![]()
![]() В начало
В начало
6.2. Постановка задачи синтеза одноканальных систем
Обсудим содержание задачи синтеза для объекта, поведение которого описывается передаточной функцией
|
|
(6.3) |
с ограниченным ресурсом
управления, ![]() Влияние
окружающей среды отражает возмущение M (t),а выходная переменная датчиком
Влияние
окружающей среды отражает возмущение M (t),а выходная переменная датчиком
|
Рис.6.3. Структурная схема объекта |
(первичным измерительным преобразователем, сенсором) с помехой измерения h(t),
Здесь |
Целью функционирования замкнутой системы регулирования является организация свойства:
|
|
(6.4) |
с заданной точностью ![]()
Наряду с условием статики (6.4) предъявляются требования и к динамике, то есть к характеру переходных процессов, в виде оценок
|
|
(6.5) |
что представляет собой основную сложность расчета.
Необходимо определить структуру и параметры регулятора, обеспечивающего выполнение требований (6.4) и (6.5) в условиях действия возмущений и помехи измерения.
Заметим, что единственной
величиной, которую можно использовать для организации управляющего воздействия
u, является полученная с помощью датчика оценка выходной величины ![]() . Поэтому в лучшем
случае в системе с заданной точностью
. Поэтому в лучшем
случае в системе с заданной точностью ![]() можно обеспечить выполнение свойства
можно обеспечить выполнение свойства
![]() при
при ![]()
а не условия (6.4). Таким образом при выборе измерительного устройства следует придерживаться рекомендаций:
1) датчик должен обладать точностью не меньшей, чем требуемая точность системы в целом;
2) нужно отфильтровывать помеху, частотный состав которой отличается от рабочих частот системы.
Ошибка регулирования представляет собой сумму трех составляющих
![]()
одна из которых ![]() порожденная входным
воздействием, может быть легко скомпенсирована с помощью масштабирования (см.
раздел 3). Помеха h(t) высокочастотная, поэтому она проявляется в динамике, а в
статике ее можно не учитывать
порожденная входным
воздействием, может быть легко скомпенсирована с помощью масштабирования (см.
раздел 3). Помеха h(t) высокочастотная, поэтому она проявляется в динамике, а в
статике ее можно не учитывать ![]()
Следовательно, при синтезе
необходимо обеспечить не более заданной статическую ошибку, порожденную
возмущением, ![]()
![]()
![]() В начало
В начало
6.3. Условия разрешимости задачи синтеза
6.3.1.Ресурсное ограничение
6.3.2.Устойчивость “обратного” объекта
6.3.3.Вырожденность передаточной функции
6.3.4. Управляемость
6.3.5. Наблюдаемость
__________________________________________________________
Выбрав подходящий метод, необходимо убедиться в том, что задача
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.