Цель работы: экспериментально исследовать статическое и астатическое регулирование. Также провести теоретическое и экспериментальное исследование устойчивости и точности работы системы с П-, И-, ПИ-законами регулирования. Определить оптимальные параметры регулятора.
Ход работы:
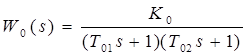
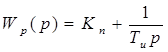
На рисунке 1 представлена структурная схема исследуемой системы.
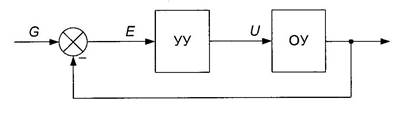
Рисунок 1 – Структурная схема исследуемой системы
Объект управления описывается передаточной функцией вида
 .
(1)
.
(1)
В качестве управляющего устройства поочерёдно используются три типа регуляторов:
- пропорциональный (П) регулятор
![]() , (2)
, (2)
- интегральный (И) регулятор
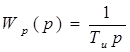 ,
(3)
,
(3)
- пропорционально-интегральный (ПИ) регулятор
 .
(4)
.
(4)
Параметры задаются в соответствии с таблицей 1.
Таблица 1 – Значения параметров системы
|
№ варианта |
Параметры регулятора |
Параметры объекта |
|||
|
|
|
|
|
|
|
|
14 |
18 |
8 |
2,5 |
1 |
8 |
Задающее воздействие ![]() Получили следующие переходные процессы
Получили следующие переходные процессы ![]() .
.
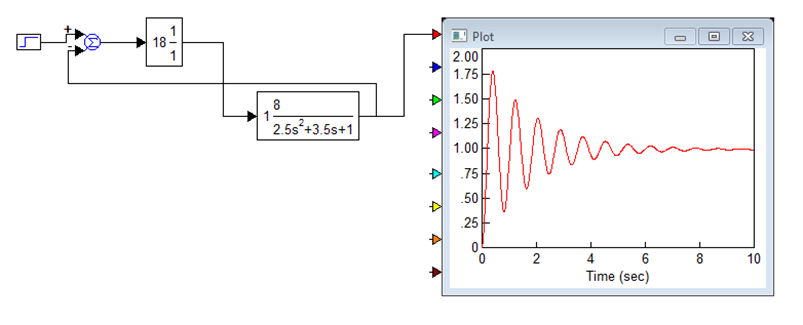
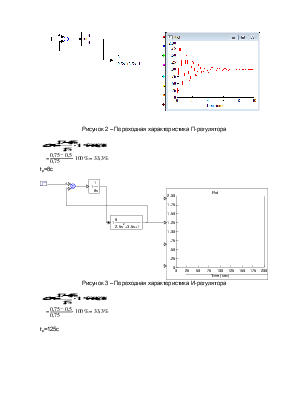
Рисунок 2 – Переходная характеристика П-регулятора
![]()
![]()
tр=8с
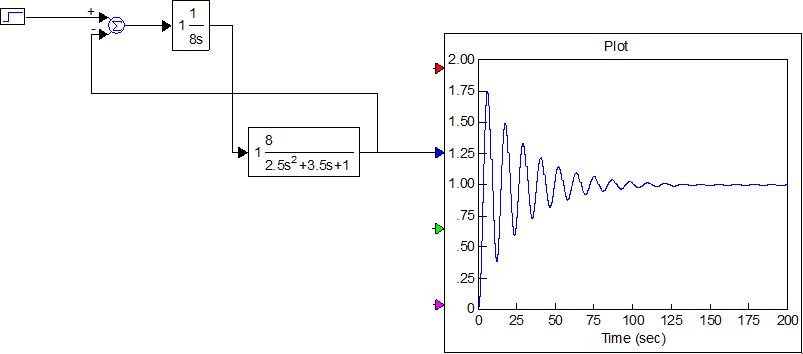
Рисунок 3 – Переходная характеристика И-регулятора
![]()
![]()
tр=125с
 Рисунок
4 – Переходная характеристика ПИ-регулятора
Рисунок
4 – Переходная характеристика ПИ-регулятора
![]()
![]()
tр=8с
Переходные процессы П- и
ПИ-регуляторов являются наилучшими, поскольку ![]() - быстрозатухающий процесс. Время регулирования
- быстрозатухающий процесс. Время регулирования ![]() составляет
8с. Перерегулирование для П и ПИ-регуляторов
составляет
8с. Перерегулирование для П и ПИ-регуляторов
![]()
Следовательно их качество можно считать удовлетворительным.
![]() И-регулятора
представляет собой плохозатухающие колебания.
И-регулятора
представляет собой плохозатухающие колебания. ![]() Перерегулирование составляет
Перерегулирование составляет
![]()
Качество неудовлетворительное.
Для САУ с каждым типом регулятора построила переходные процессы при уменьшенных на 10% и увеличенных на 10% параметрах регулятора.
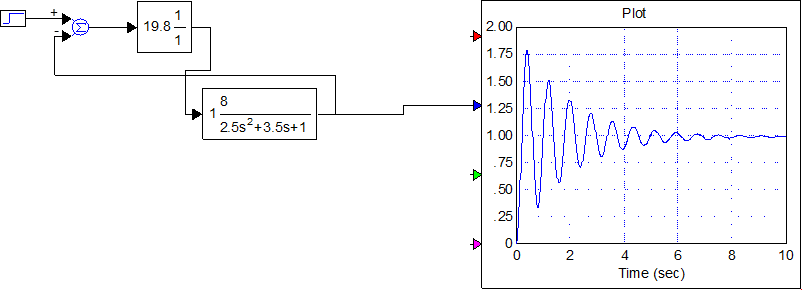
Рисунок 5 – Переходная характеристика П-регулятора при
увеличении ![]() на
10%
на
10%
![]()
![]()
tр=8с
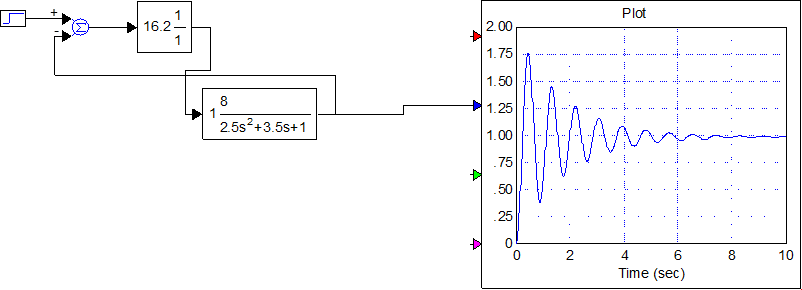
Рисунок 6 – Переходная характеристика П-регулятора при
уменьшении ![]() на
10%
на
10%
![]()
![]()
tр=8с
Таблица 2 — Параметры h(t) П-регулятора при изменении параметра Ти
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
16,67% |
16,67% |
|
|
33,3% |
33,3% |
33,3% |
|
tр |
8с |
8с |
8с |
При
увеличении и уменьшении параметра ![]() П-регулятора остается неизменной. Это говорит о её
устойчивости по отношению к погрешностям исходных данных.
П-регулятора остается неизменной. Это говорит о её
устойчивости по отношению к погрешностям исходных данных.
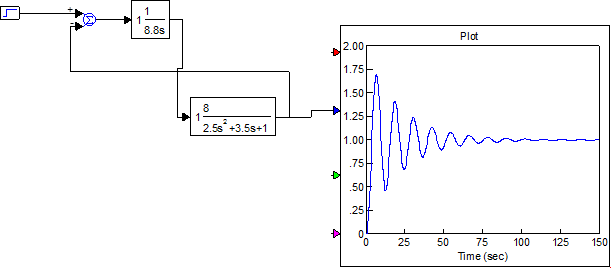
Рисунок 7 – Переходная характеристика И-регулятора при
увеличении ![]() на
10%
на
10%
![]()
![]()
tр=100с
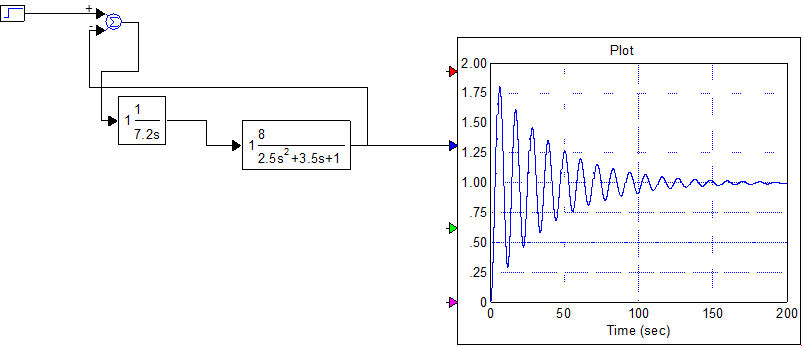
Рисунок 8 – Переходная характеристика И-регулятора при
уменьшении ![]() на
10%
на
10%
![]()
![]()
tр=200с
Таблица 3— Параметры h(t) И-регулятора при изменении параметра Ти
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
18,44% |
12,5% |
|
|
33,3% |
38,3% |
25% |
|
tр |
125с |
100с |
200с |
При увеличении параметра ![]() И-регулятора
переходной процесс становится лучше, перерегулирование уменьшается до 18,44%,
время регулирования тоже уменьшается, но все же процесс длительный и
плохозатухающий.При уменьшении параметра переходной процесс становиться хуже,
перерегулирование, степень затухания уменьшаются, время регулирования
увеличивается.
И-регулятора
переходной процесс становится лучше, перерегулирование уменьшается до 18,44%,
время регулирования тоже уменьшается, но все же процесс длительный и
плохозатухающий.При уменьшении параметра переходной процесс становиться хуже,
перерегулирование, степень затухания уменьшаются, время регулирования
увеличивается.
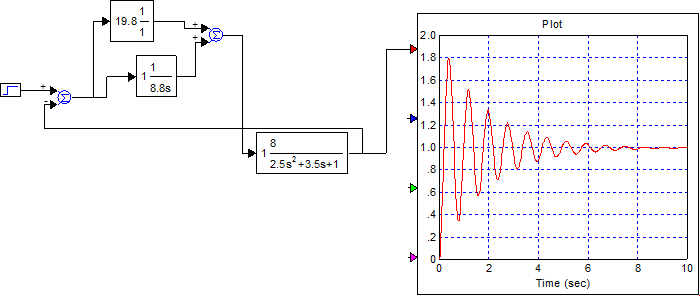
Рисунок 9 – Переходная характеристика ПИ-регулятора при увеличении на 10%параметров
![]()
![]()
tр=10с
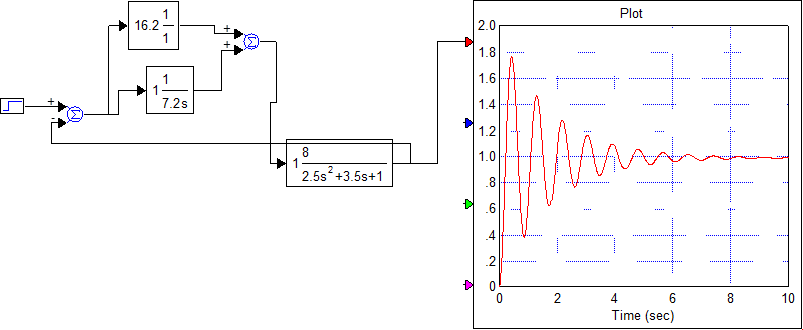
Рисунок 10 – Переходная характеристика ПИ-регулятора при уменьшении параметров на 10%
![]()
![]()
tр=8с
Таблица 4 — Параметры h(t) ПИ-регулятора при изменении параметра Ти
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
20% |
20,7% |
|
|
33,3% |
37,5% |
40% |
|
tр |
8с |
10с |
8с |
При увеличении параметра ПИ-регулятора, качество процесса перерегулирование и степень затухания увеличиваются, но при этом время регулирования увеличивается, при уменьшении параметра время регулирования остается неизменным, а перерегулирование и степень затухания увеличивается.
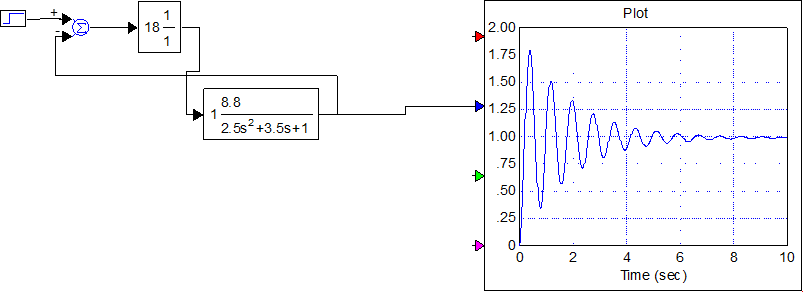
Рисунок 11 – Переходная характеристика П-регулятора
при увеличении параметра ![]() на 10%
на 10%
![]()
![]()
tр=8с
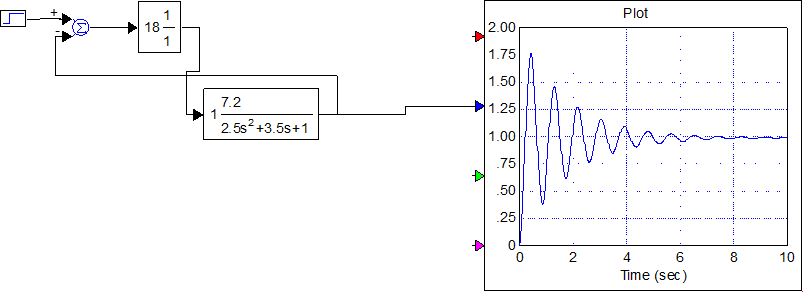
Рисунок 12 – Переходная характеристика П-регулятора
при уменьшении параметра ![]() на 10%
на 10%
![]()
![]()
tр=8с
Таблица 5 — Параметры h(t) П-регулятора при изменении параметра Коб
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
16,67% |
16,67% |
|
|
33,3% |
33,3% |
33,3% |
|
tр |
8с |
8с |
8с |
При
увеличении и уменьшении параметра ![]() П-регулятора остается неизменной. Это говорит о её
устойчивости по отношению к погрешностям исходных данных.
П-регулятора остается неизменной. Это говорит о её
устойчивости по отношению к погрешностям исходных данных.
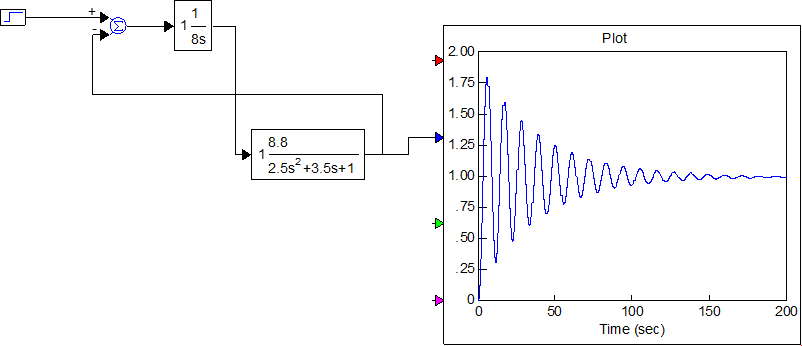
Рисунок 13 - Переходная характеристика И-регулятора
при увеличении параметра ![]() на 10%
на 10%
![]()
![]()
tр=200с
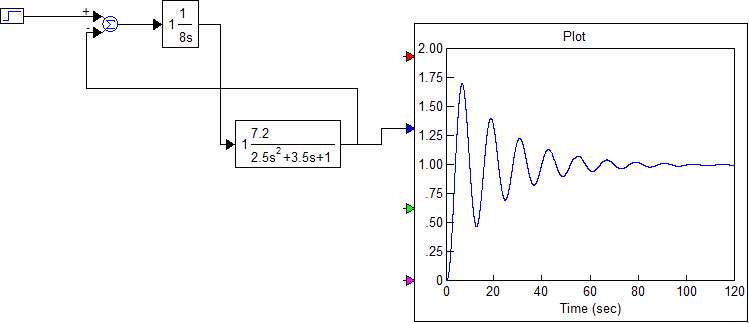
Рисунок 14 - Переходная характеристика И-регулятора
при уменьшении параметра ![]() на 10%
на 10%
![]()
![]()
tр=100с
Таблица 6 — Параметры h(t) И-регулятора при изменении параметра Коб
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
12,5% |
18,46% |
|
|
33,3% |
25% |
55,2% |
|
tр |
125с |
200с |
100с |
Время регулирования ![]() И-регулятора при увеличении параметра увеличивается,
значит качество ухудшается. А при уменьшении параметра время регулирования
сокращается, перерегулирование и степень затухания увеличиваются, значит
качество улучшается.
И-регулятора при увеличении параметра увеличивается,
значит качество ухудшается. А при уменьшении параметра время регулирования
сокращается, перерегулирование и степень затухания увеличиваются, значит
качество улучшается.
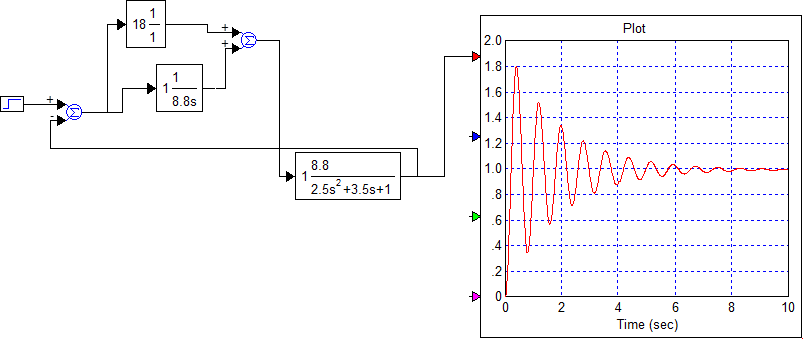
Рисунок 15 - Переходная характеристика ПИ-регулятора
при увеличении параметра ![]() на 10%
на 10%
![]()
![]()
tр=8с
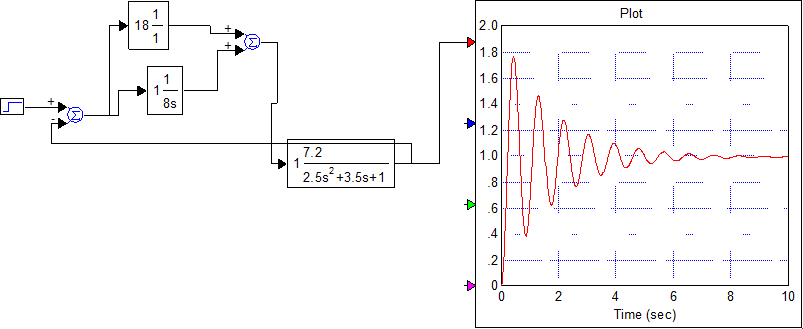
Рисунок 16 - Переходная характеристика ПИ-регулятора
при уменьшении параметра ![]() на 10%
на 10%
![]()
![]()
tр=8с
Таблица 7 — Параметры h(t) ПИ-регулятора при изменении параметра Коб
|
До изменения |
При увеличении на 10% |
При уменьшении на 10% |
|
|
|
16,67% |
19,2% |
20,14% |
|
|
33,3% |
36,25% |
39,7% |
|
tр |
8с |
8с |
8с |
И при увеличении, и при уменьшении параметра ПИ-регулятора качество улучшается, т. к. Перерегулирование и степень затухания увеличиваются, а время регулирования не меняется.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.