 , (3.22)
, (3.22)
где Кр – коэффициент пропорциональности;
Ти – постоянная времени интегрирования;
Тд – постоянная времени дифференцирования
3.3
Определение настроек регулятора для АСР температуры в
кубе-испарителе
Расчёт настроек регулятора на практике обычно настройки определяют по приближённым формулам, а затем производят их уточнение.
Определим настройки ПИД-регулятора по приближённым формулам [10, таблица 2.2]
Кр = 1,4·Тоб/(Коб·τоб), (3.23)
Ти = 1,3·τоб, (3.24)
Тд = 0,5·τоб. (3.25)
Подставив значения получаем
Кр = 1,4·177,6/(34,25·101,29) = 0,072 мА,
Ти = 1,3·101,29 = 131,68 с,
Тд = 0,5·101,29 = 50,65 с.
Для построения переходного процесса и определения оптимальных настроек регулятора используем ПП VisSim 3.0.
Для оптимизации необходимы начальные значения коэффициентов составляющих ПИД-закона регулирования
Кп = Кр, (3.26)
Ки = Кп/Ти, (3.27)
Кд = Кп·Тд (3.28)
Получаем
Кп = 0,072 мА,
Ки = 0,00055 с,
Кд = 3,65 с.
Переходной процесс с рассчитанными настройками ПИД-регулятора изображен на рисунке 3.7.
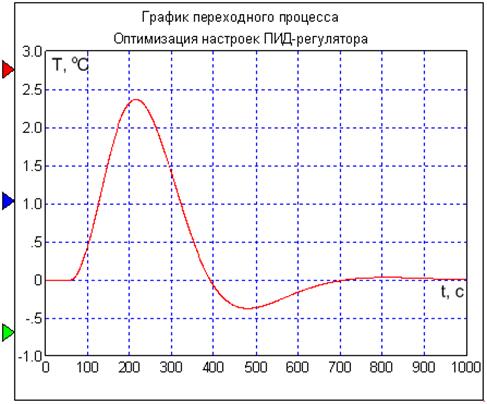
Рисунок 3.7 – Переходной процесс с рассчитанными настройками
ПИД-регулятора
Далее проводим оптимизацию. После проведения оптимизации переходной процесс принимает вид, приведенный на рисунке 3.8.
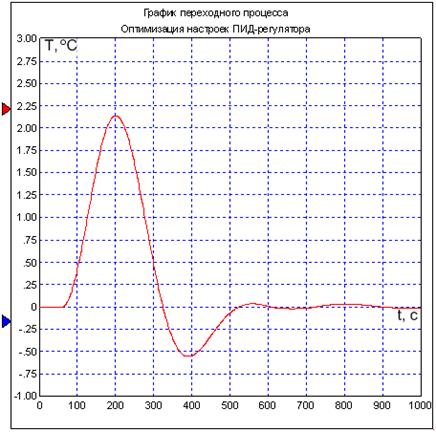
Рисунок 3.8 – Переходной процесс с оптимальными настройками
ПИД-регулятора
В результате проведения оптимизации процесса были получены следующие оптимальные настройки регулятора
Кп = 0,0956;
Ти = 0,0956/0,00080784 = 118,3 с;
Тд = 4,95/0,0956 = 51,778 с.
Из графика переходного процесса (рисунок 3.8) видим, что при найденных настройках регулятора время переходного процесса равно 500 с (учитывая коридор равный 0,04 °С) и максимальное динамическое отклонение менее 3 °С, что удовлетворяет заданным показателям качества регулирования процесса.
3.4 Исследование устойчивости системы
Исследуем устойчивость системы регулирования температуры в кубе-испарителе определим запасы устойчивости системы по модулю и по фазе, используя частотный критерий Найквиста.
Для этого рассчитаем АФЧХ объекта и регулятора, которые получают подстановкой p = jωв передаточные функции (3.20) и (3.22).
Передаточная функция объекта примет вид
 .
.
Для начала определим АФХ объекта без учета запаздывания
 .
.
Разделим выражение Wо(jω) на вещественную и мнимую части. Для этого умножим числитель и знаменатель Wо(jω) на комплексно-сопряженное знаменателю выражение
Выражения для вещественной Po(ω) и мнимой Qo(ω) частей равны
 .
.
 .
.
Учтем запаздывание в системе
Wз(jω) = e-jωτ = cos(ωτ) – jsin(ωτ) = Pз(ω) – jQ(ω). (3.29)
Тогда АФЧХ объекта будет
W(jω) = Wо(jω)·Wз(jω) = [Ро(ω) + jQо(ω)]·[Рз(ω) + jQз(ω)] = [Ро(ω)·Рз(ω) –
–Qо(ω)·Qз(ω)]+j[Qо(ω)·Рз(ω) + Ро(ω)·Qз(ω)]. (3.30)
Подставив выражения Р(ω), Q(ω), Рз(ω),Qз(ω), получим
Выразим действительную и мнимую части
 ,
,
 .
.
Рассчитаем передаточную функцию регулятора

 .
.
Выделим вещественную и мнимую части и подставим значения оптимальных настроек регулятора Кп = 0,0956, Ти = 118,3, Тд = 51,778, в результате получим
Рр(ω) = Кп = 0,0956;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.