Так как ошибка аппроксимации больше допустимого значения 3 %, осуществляем аппроксимацию объекта последовательным соединением двух апериодических звеньев и звена запаздывания (решением дифференциального уравнения второго порядка с запаздывающим аргументом). Передаточная функция будет иметь вид
 , (3.12)
, (3.12)
где Т1 и Т2 – постоянные времени объекта.
Находим относительное время по формуле
 , (3.13)
, (3.13)
 .
.
По графику [10, рисунок 6.2] найдем значения T*1 и T*2 и определим действительные значения постоянных времени (T1, T2)
Т*1 = 0,32,
Т*2 = 0,48.
Следовательно
Т1 = Т*1·t7, (3.14)
Т2 = Т*2·t7. (3.15)
Подставив значения получаем
Т1 = 0,32·247,5 = 79,2,
Т2 = 0,48·247,5 = 118,8.
Таким образом, передаточная функция объекта будет иметь вид
 . (3.16)
. (3.16)
Найдем координаты аппроксимирующей кривой по формуле
 (3.17)
(3.17)
Для нахождения среднеквадратической ошибки аппроксимации вычислим отношение
dа2 = {[ΔTн(t) – ΔТна2(t)]/ΔTн(Ty)}2. (3.18)
Результаты расчетов приведены в таблице 3.4, а аппроксимирующая кривая показана на рисунке 3.6.
Таблица 3.4 – Ординаты переходной функции
|
t,c |
0 |
67,5 |
135,00 |
180,00 |
270,00 |
36,00 |
450,00 |
495,00 |
540,00 |
|
DТн(t) |
0 |
0,0 |
0,15 |
0,29 |
0,58 |
0,80 |
0,93 |
0,98 |
1,00 |
|
DТнап2(t) |
0 |
0,0 |
0,15 |
0,32 |
0,61 |
0,79 |
0,89 |
0,93 |
0,95 |
|
da2·10-3 |
0 |
0,0 |
0,05 |
0,73 |
0,63 |
0,08 |
1,44 |
2,60 |
2,60 |
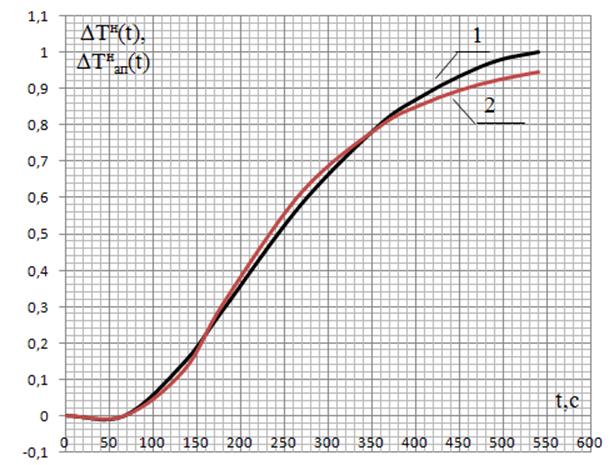
1 – нормированная; 2 – при аппроксимации решением
дифференциального уравнения второго порядка
Рисунок 3.6 – Переходные характеристики объекта
Рассчитаем среднеквадратичную ошибку аппроксимации по формуле
 . (3.19)
. (3.19)
δ = 2,94 %.
Так как погрешность аппроксимация меньше 3%, окончательно принимаем передаточную функцию объекта в виде
 . (3.20)
. (3.20)
3.2 Выбор типа регулятора для АСР температуры в кубе-испарителе
Исходными данными для определения настроек регулятора являются заданные показатели качества регулирования, определяемые технологическим процессом и параметры объекта управления Коб
Тип регулятора выбираем из таблицы [10, таблица 2.1] по отношению
τоб/Тоб = 101,29/177,6 = 0,57.
В соответствии с этой таблицей выбираем регулятор непрерывного действия.
Рассчитываем динамический коэффициент регулирования по формуле
Rд = y1/(Коб·ΔXвх.max), (3.21)
Rд = 3/34,25·0,5 = 0,175.
По графику [10, рисунок 2.3] определяем, что Rд = 0,175 для требуемого вида переходного процесса, а именно, с минимальным квадратичным интегральным показателем, может обеспечить ПИД-регулятор.
По графику [10, рисунок 2.4] находим для ПИД-регулятора отношение
tp/τоб = 10.
Откуда время регулирования
tр = 10∙τоб,
tр = 10·101,29 = 1012,9 с,
что больше допустимого времени регулирования tр ≤ 500 с.
Несмотря на то, что полученное время регулирования превысило допустимое значение выбираем закон ПИД-регулирования, так как он является наиболее
сложным законом регулирования.
Передаточная функция ПИД-регулятора имеет вид
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.