








Кафедра “АПП”
по курсу: "АТПП" для спец. 210.200
Рассмотрено
на заседании
кафедры АПП
(Протокол N )
ИССЛЕДОВАНИЕ АСР, ФУНКЦИОНИРУЮЩИХ
В СОСТАВЕ АСУТП ( часть 1-4ч; часть 2- 4ч)
ЦЕЛЬЮ работы является: изучение устройства современных АСУТП и их работы, методов разработки локальных АСР и средств автоматизации на базе которых они строятся.
Одной из основных частей АСУ ТП являются локальные АСР. Именно с их синтеза чаще всего и начинается разработка АСУ ТП.
Синтез АСР осуществляют в два этапа.
Первый этап - структурный синтез - выполняется на стадии разработки (проектирования) системы. На этом этапе определяются статические и динамические свойства технологического объекта, составляется его математическая модель - передаточная функция, выбирается тип автоматического регулятора, функциональные средства автоматизации, способы их включения и прочее, т.е. разрабатывается структура АСР.
Второй этап - параметрический синтез - выполняется на стадии включения смонтированной АСР. На этом этапе определяются оптимальные параметры настройки автоматических регуляторов, обеспечивающие оптимальный переходный процесс в системе.
Для определения математического описания объектов управления чаще всего используют экспериментальные методы, при этом отдается предпочтение методу переходной функции.
Выбор типа автоматического регулятора производится с учетом заданных параметров качества переходного процесса и свойств объекта регулирования.
Для характеристики переходных процессов в АСР применяют показатели качества (рисунок 1): динамическое отклонение – У1, время регулирования – tp, перерегулирование У2/ У1, остаточное отклонение – Уст.
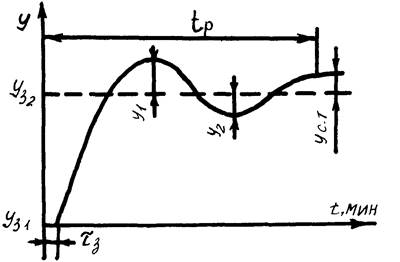
Рисунок 1 - Переходный процесс в АСР при возмущении по заданию
Динамическим отклонением называется наибольшее отклонение параметра от заданного значения. Оно зависит от динамических свойств (инерционности) объекта, вида возмущения, закона регулирования (рисунок 2) и настроек регулятора (рисунок 3).
Под временем регулирования понимается время, в течение которого регулируемый параметр приводится системой регулирования к установившемуся значению близкому к заданному.
![]()
![]()
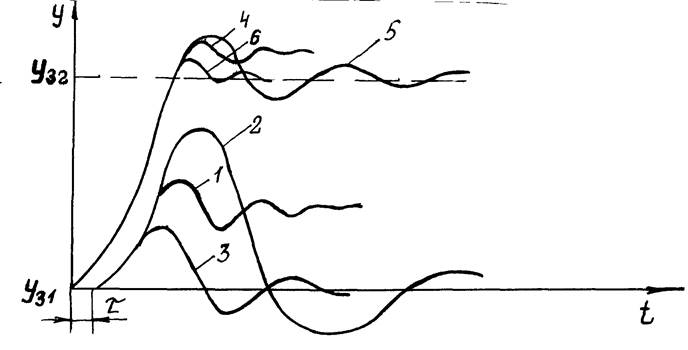
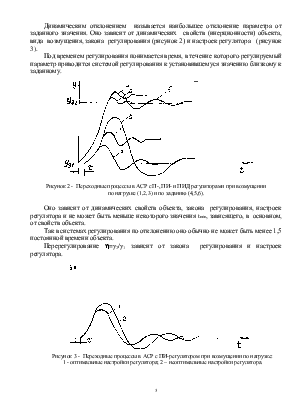
Рисунок 2 - Переходные процессы в АСР с П-, ПИ- и ПИД регуляторами при возмущении
по нагрузке (1,2,3) и по заданию (4,5,6).
Оно зависит от динамических свойств объекта, закона регулирования, настроек регулятора и не может быть меньше некоторого значения tmin, зависящего, в основном, от свойств объекта.
Так в системах регулирования по отклонению оно обычно не может быть менее 1,5 постоянной времени объекта.
Перерегулирование h=y2/y1 зависит от закона регулирования и настроек регулятора.
![]()
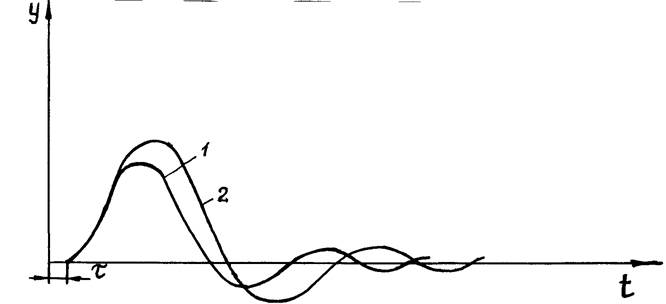
Рисунок 3 - Переходные процессы в АСР с ПИ-регулятором при возмущении по нагрузке:
1 - оптимальные настройки регулятора; 2 – неоптимальные настройки регулятора.
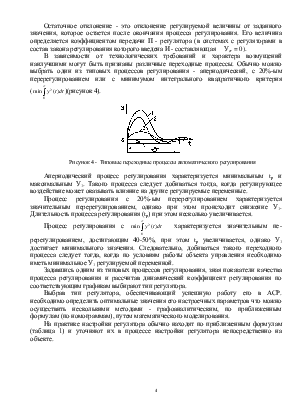
Остаточное отклонение - это отклонение регулируемой величины от заданного значения, которое остается после окончания процесса регулирования. Его величина определяется коэффициентом передачи П - регулятора (в системах с регуляторами в состав закона регулирования которого введена И - составляющая Уст = 0).
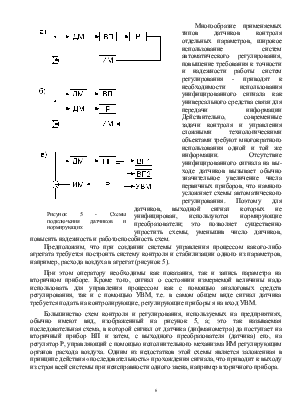
В зависимости от технологических
требований и характера возмущений наилучшими могут быть признаны различные
переходные процессы. Обычно можно выбрать один из типовых процессов
регулирования - апериодический, с 20%-ым перерегулированием или с минимумом
интегрального квадратичного критерия (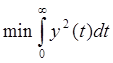 )(рисунок
4).
)(рисунок
4).
Рисунок 4 - Типовые переходные процессы автоматического регулирования
Апериодический процесс регулирования характеризуется минимальным tp и максимальным У1. Такого процесса следует добиваться тогда, когда регулирующее воздействие может оказывать влияние на другие регулируемые переменные.
Процесс регулирования с 20%-ым перерегулированием характеризуется значительным перерегулированием, однако при этом происходит снижение У1. Длительность процесса регулирования (tp) при этом несколько увеличивается.
Процесс регулирования с характеризуется значительным перерегулированием,
достигающим 40-50%, при этом tp увеличивается, однако У1 достигает
минимального значения. Следовательно, добиваться такого переходного процесса
следует тогда, когда по условиям работы объекта управления необходимо иметь
минимальное У1 регулируемой переменной.
Задавшись одним из типовых процессов регулирования, зная показатели качества процесса регулирования и рассчитав динамический коэффициент регулирования по соответствующим графикам выбирают тип регулятора.
Выбрав тип регулятора, обеспечивающий успешную работу его в АСР. необходимо определить оптимальные значения его настроечных параметров что можно осуществить несколькими методами - графоаналитическим, по приближенным формулам (по номограммам), путем математического моделирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.