|
hоg(t) = hg(t)/Ag .. |
(5) |
Если разброс между функциями hоg(t) незначителен (менее 3%), то для последующей обработки выбирается любая из полученных переходных функций. В противном случае производится усреднение hоg(t) по множеству номеров g, то есть находят усредненную единичную переходную функцию:
|
|
(6) |
В некоторых случаях математическое описание объекта управления осуществляют по нормированной переходной функции hн (t)
|
|
или
|
|
где hоg(Tу),
![]() (Tу) - значения единичной
и усредненной единичной переходных функций при времени установления (Tу),
соответственно.
(Tу) - значения единичной
и усредненной единичной переходных функций при времени установления (Tу),
соответственно.
По переходным функциям определяют величины: коэффициент усиления объекта (Kоб), постоянные времени объекта (T), запаздывание (t).
Коэффициент усиления объекта:
Kоб = hоg(Tу)
или Kоб = ![]() (Tу).
(Tу).
Величину запаздывания t находят как отрезок времени, внутри которого выполняется неравенство 0 < hоg(t) < D , где величина D обычно составляет
(0,01¸0,02) ![]() (Tу).
(Tу).
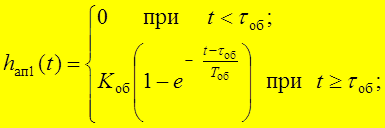
При математическом описании объектов управления в начале находят наиболее простую математическую модель объекта - линейное дифференциальное уравнение первого порядка с запаздывающим аргументом (последовательного соединения апериодического звена и звена запаздывания). Последующий выбор регулятора и определение его приближенных настроек по формулам или номограммам основан на предположении, что объект аппроксимирован последовательным соединением апериодического звена и звена запаздывания.
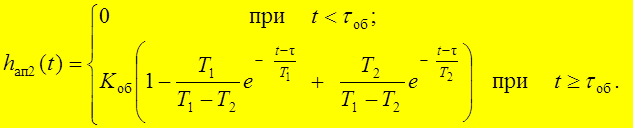
После вычисления точности такой аппроксимации, в случае, если, она не удовлетворяет исследователя, порядок аппроксимирующего уравнения увеличивается. Причем повышение степени аппроксимирующего уравнения свыше двух нерационально, т.е. переходные характеристики объекта обычно определяются с точностью порядка 10-15%.
Вычисление аппроксимирующей (теоретической) переходной характеристики для ее анализа и сравнения с экспериментальной осуществляют по зависимостям:
|
|
(5) |
|
|
(6) |
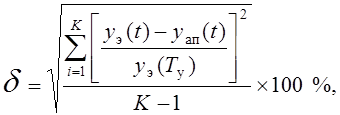
Для оценки точности аппроксимации определяют среднеквадратичную погрешность
|
|
(6) |
где yэ (t), yап (t) – значение экспериментальной и аппроксимирующей переходной функции в момент времени t соответственно; yэ (Tу ) - установившееся значение экспериментальной переходной функции; К - число точек yэ (t) и yап (t).
Аппроксимация удовлетворительна, если погрешность δ не более 3%.
Регуляторы
Функционирование регуляторов происходит в соответствии с алгоритмом регулирования, описывающим зависимость выходной величины регулятора от входной величины. Существуют несколько типовых алгоритмов (законов) регулирования:
- пропорциональный (П-закон);
- интегральный (И-закон);
- пропорционально–интегральный (ПИ-закон);
- пропорционально–интегрально–дифференциальный (ПИД-закон);
- пропорционально–дифференциальный (ПД-закон);
- двухпозиционный;
- трехпозиционный.
Пропорциональный закон регулирования
Пропорциональный закон описывается уравнением
yp (t) = Кp xp(t) ,
где yp(t) , xp(t) – выходной и входной сигналы регулятора, Кp – коэффициент пропорциональности, являющийся параметром настройки П-регулятора.
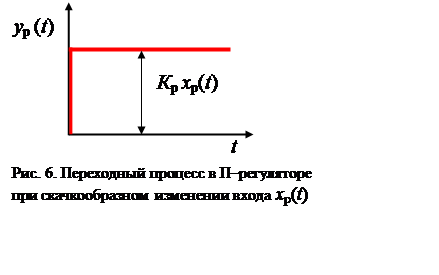 У этих регуляторов отклонение регулируемой величины х
от ее заданного значения х0 вызывает перемещение
регулирующего органа на величину, пропорциональную этому отклонению (рис.6).
У этих регуляторов отклонение регулируемой величины х
от ее заданного значения х0 вызывает перемещение
регулирующего органа на величину, пропорциональную этому отклонению (рис.6).
xp= х – х0.
Передаточная функция П-регулятора равна
W(s) = Y(s)/X(s) = Кp.
Интегральный закон регулирования
Процесс регулирования происходит по закону, описываемому уравнением
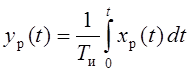 ,
,
где Tи – постоянная времени интегрирования – параметр настройки И-регулятора.
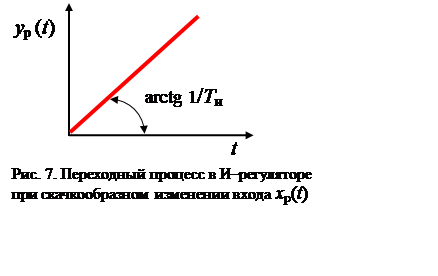 Интегральные
регуляторы производят перемещение регулирующего органа, пропорционально
интегралу изменения регулируемой величины до тех пор, пока не восстановится ее
заданное значение (рис. 7) .
Интегральные
регуляторы производят перемещение регулирующего органа, пропорционально
интегралу изменения регулируемой величины до тех пор, пока не восстановится ее
заданное значение (рис. 7) .
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ,
, ,
,