Вид возмущения – скачек.
Построим переходной процесс САР (рисунок 18)
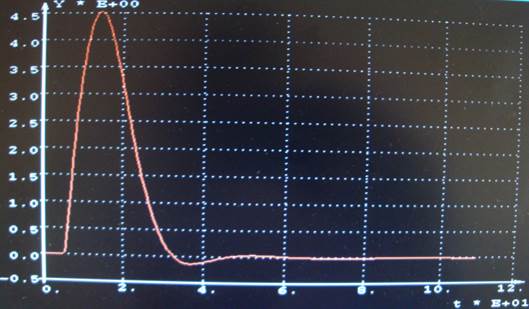
Рисунок 18 – Переходной процесс САР с рекомендуемыми параметрами
Максимальная динамическая ошибка = 4,53058.
Степень затухания = 0,991192.
Время регулирования = 30,3160.
Переходная характеристика имеет большое динамическое отклонение, но без перерегулирования.
Выполним проверку САР на грубость, получим переходной процесс (рисунок 19).
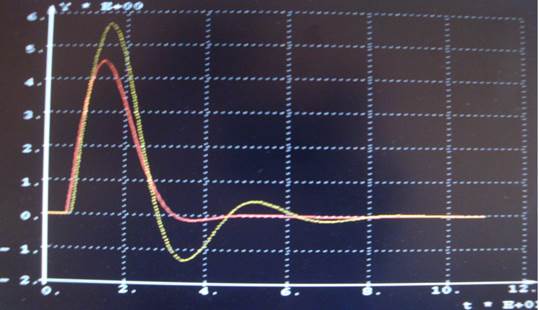
Сплошная – САР с исходным объектом; пунктир – САР с объектом, у которого коэффициент усиления и запаздывания увеличены на 20%
Рисунок 19 – Проверка САР на грубость
Максимальная динамическая ошибка = 5,64977.
Степень затухания = 0,923628.
Время регулирования = 56,0560.
По графикам на рисунке 17 видно, что при увеличении коэффициента усиления и запаздывания на 20% качество ухудшается. Максимальная динамическая ошибка увеличивается на 24,72%, а время регулирования на 25,74 с, переходной процесс становится колебательным.
Проведем оптимизацию параметров регулятора методом поиска.
Выбираем критерий ITAE.
Оптимальные значения:
Критерий Кр Ти
1010,4 0,12258 6,8936
Построим переходной процесс системы с оптимальными параметрами (рисунок 20).
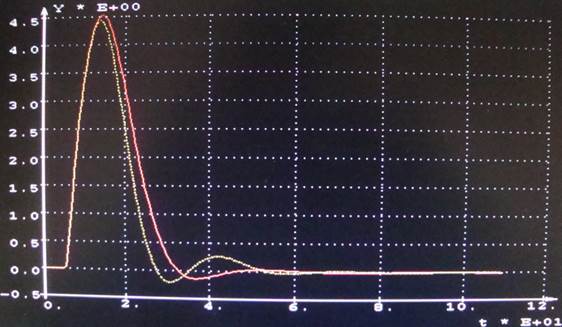
Сплошная – выход САР с исходными параметрами; пунктир – с оптимальными.
Рисунок 20 – Переходной процесс системы с оптимальными параметрами
Максимальная динамическая ошибка = 4,43428.
Степень затухания = 0,939782.
Время регулирования = 26,3120.
Качество переходного процесса системы в оптимальными параметрами выше чем с исходными. Уменьшилась динамическая ошибка и вдвое сократилось время регулирования.
3.2.1 Настройка САР с опережающим импульсом. Схема с дифференциатором.
Расчет параметров дифференциатора:
ПИ-регулятор Wp = Кр[1+1/(Tи*s),
где Кр = 0,03; Ти = 0,78.
Дифференциатор
Wg =  ,
,
где Кg = 21,261; Тg = 3,84.
Возмущение на входе объекта (по нагрузке) – единичный скачек.
Построим переходной процесс (рисунок 21).
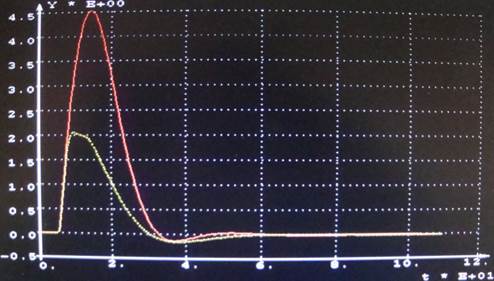
Сплошная – выход одноконтурной САР;
пунктир – выход САР с опережающим импульсом.
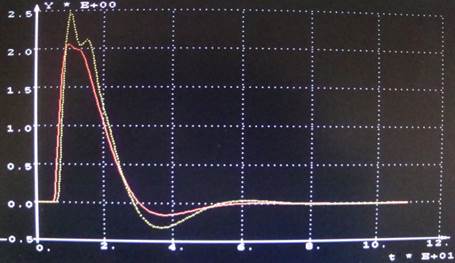
Рисунок 21 – Переходные процессы САР
Максимальная динамическая ошибка = 2,06053.
Степень затухания = 0,99501.
Время регулирования = 26,8840.
САР с опережающим импульсом (схема с дифференциатором) имеет намного меньшую динамическую ошибку чем одноконтурная САР.
Проверим САР на грубость (рисунок 22).
Сплошная – выход Y1 САР с исходным объектом; пунктир – выход Y1 САР с объектом, у которого коэффициент усиления и запаздывания увеличены на 20%.
Рисунок 22 – Проверка САР на грубость
Максимальная динамическая ошибка = 2,46921.
Степень затухания = 0,982544.
Время регулирования = 26,312.
При увеличении коэффициента усиления и запаздывания на 20% наблюдается увеличение динамической ошибки на 16,6%.
Проведем оптимизацию параметров регулятора методом поиска.
Оптимальные параметры:
Критерий Кр Ти
210,76 0,052712 0,58067
Построим переходной процесс САР с дифференциатором при оптимальных параметрах (рисунок 23).
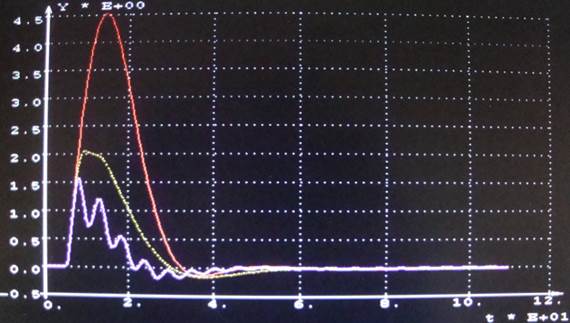
Сплошная – выход одноконтурной САР; пунктир – выход САР с опережающим импульсом; сплошная(низ) – выход САР с опережающим импульсом
при оптимальным параметрах
Рисунок 23 – Переходные процессы САР
Максимальная динамическая ошибка = 1,55769.
Степень затухания = 0,923489.
Время регулирования = 20,5920.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.