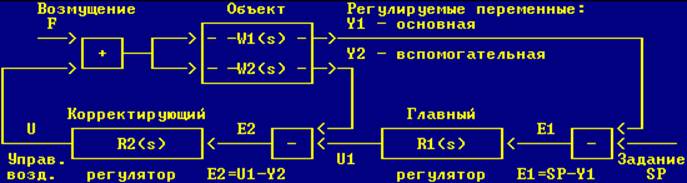
Рисунок 1 – Схема обычной каскадной САР
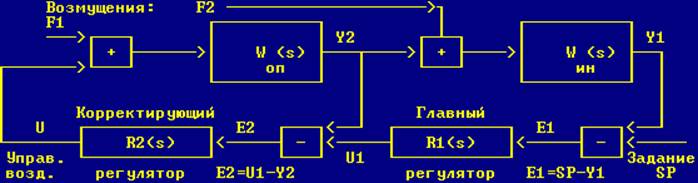
Рисунок 2 – Схема каскадной САР с промежуточным импульсом
В первом случае основная и вспомогательная переменные Y1 и Y2 могут иметь совершенно разную физическую природу ( например, основной регулируемой переменной является температура теплоносителя на выходе теплообменника, а вспомогательной переменно- расход того же или другого теплоносителя на его входе). Соответственно и информация об обоих каналах объекта W1(s) и W2(s) может быть получена и введена в систему по-разному (например, для одного канала может быть задана экспериментальная кривая разгона, а для другого- ранее определенная передаточная функция).
Во втором случае объект представляет собой последовательное соединение опережающей части с передаточной функцией Wоп(s) и инерционной с передаточной функцией Wин(s).
Этот тип каскадной САР применяется чаще всего для управления инерционными технологическими процессами с распределенными по пространственно координате переменными.
Однако в отличие от САР с опережающим импульсом, где вспомогательная переменная вводится только для улучшения качества регулирования основной переменной, в каскадной САР обычно оба контура регулирования (и внутренний, и внешний) имеют также и самостоятельное значение, а воздействие главного регулятора на задание корректирующему, кроме эффекта опережения для лучшей стабилизации основной регулируемой переменной Y1, преследует цель координации совместной работы обоих контуров (причем не только в динамике, но и в статике).
Для обоих типов каскадной схемы настройка организуется в определенной последовательности, заключающейся в том, что сначала настраивается внутренний контур, т.е. определяются (вычисляются автоматически системой или задаются с пульта пользователем) параметры настройки корректирующего регулятора R2(s), а затем для получившегося эквивалентного объекта, включающего настроенный внутренний контур, аналогично определяются параметры настройки главного регулятора R1(s).
САР с опережающим импульсом часто применяется при управлении объектами, в которых регулируемые переменные распределены по пространственной координате. Управляющий канал объекта представляется в виде последовательного соединения двух участков: опережающего- с передаточной функцией WОП(s) и инерционного- с передаточной функцией WИН(s) (рисунок 3).
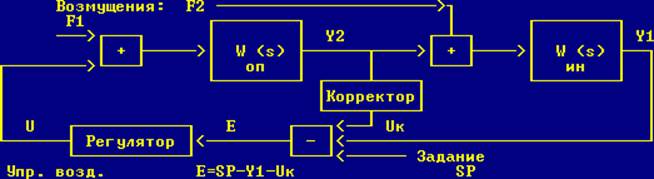
Рисунок 3 – Схема САР с опережающим импульсом
Подача на вход регулятора дополнительного импульса из промежуточной точки, обычно представляющего собой сигнал от датчика, изменяющего вспомогательную регулируемую величину Y2, создает опережение при возмущении со стороны регулирующего органа: выход регулятора U начинает изменяться раньше, чем регулируемая величина Y1. Опережающий сигнал формируется с помощью корректора, представляющего собой дифференциатор или упредитель Смита.
Настройка САР с опережающим импульсом заключается в последовательной настройке сначала корректора- по передаточной функции инерционного участка WИН(s), а затем и основного регулятора (обычно- ПИ) по передаточной функции опережающего участка WОП(s) (с учетом корректора).
В каскадной САР с односторонней автономностью применена динамическая развязка контуров каскадной САР с помощью компенсатора, обеспечивающая независимость ошибки внутреннего контура по отношению к управляющему действию главного регулятора (рисунок 4).
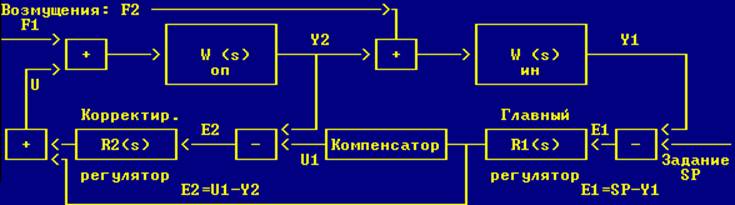
Рисунок 4 – Схема каскадной САР с односторонней автономностью
Здесь за основу берется описанная выше каскадная САР с использованием импульса из промежуточной (по пространственно координате) точки, ориентированная на управление распределенными технологическими процессами. Объект управления в виде последовательного соединения опережающей части с передаточной функцией WОП(s) и инерционной- с передаточной функцией WИН(s).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.