Степень затухания = 0,941194.
Время регулирования = 19,1250.
В результате оптимизации параметров максимальная динамическая ошибка уменьшилась на 2,33%, а время регулирования сократилось на 3,4, следовательно, качество переходного процесса одноконтурной САР улучшилось.
Настро1им регулятор R2. Процесс с умеренным затуханием.
Параметры настройки регулятора:
Кр = 0,2; Ти = 0,480 с.
Моделирование переходного процесса САР (рисунок 11)
Сплошная – выход опережающего участка Y2; пунктир – регулируемый выход Y1.
Рисунок 11 – Переходные процессы
Для регулятора R2 получили следующие показатели качества:
Максимальная динамическая ошибка = 1,21814.
Степень затухания = 0,943955.
Время регулирования = 6,09157.
Проверим регулятор R2 на грубость (рисунок 12).
Сплошная – выход Y2 САР с исходным опережающим участком;
пунктир – выход Y2 САР с опережающим участком, у которого коэффициент усиления и запаздывание увеличены на 20%.
Рисунок 12 – Проверка регулятора R2 на грубость
Максимальная динамическая ошибка = 1,21814.
Степень затухания = 0,943955.
Время регулирования = 5,95000.
При увеличении коэффициента усиления и запаздывания качество ухудшается, а именно, на 0,142 с увеличивается время регулирования, переходной процесс становится колебательным.
Выполним настройку регулятора R1. Процесс с умеренным затуханием.
Возмущение на входе объекта (по нагрузке). Вид возмущения – скачок.
Переходной процесс представлен на рисунке 13.
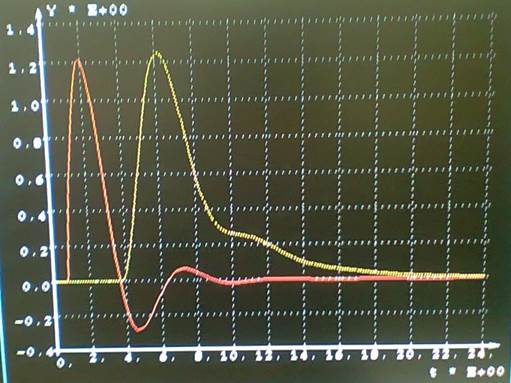
Сплошная – выход одноконтурной САР; пунктир – выход каскадной САР.
Рисунок 13 – Переходной процесс
Переходной процесс каскадной САР имеет меньшую динамическую ошибку, чем одноконтурной САР.
Максимальная динамическая ошибка = 1,90531.
Степень затухания = 0,977972.
Время регулирования = 32,0320.
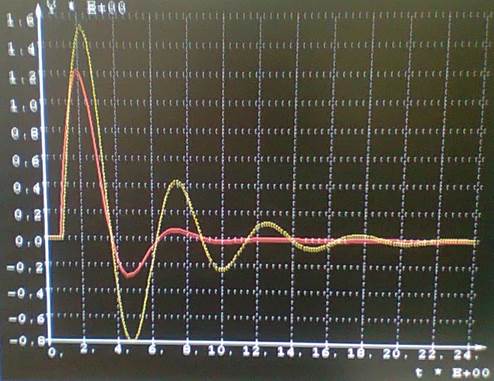
Проверим САР на грубость (рисунок 14).
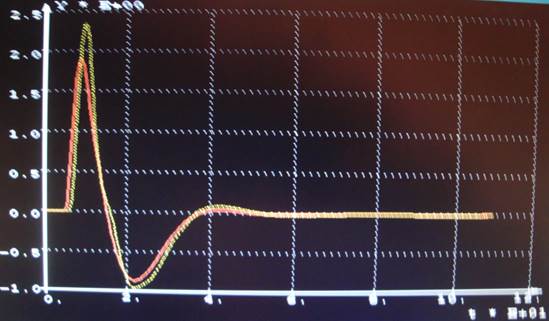
Рисунок 14 – Проверка САР на грубость
Максимальная динамическая ошибка = 2,34496.
Степень затухания = 0,963742.
Время регулирования = 32,0320.
При увеличении коэффициента усиления и запаздывания на 20% качество переходного процесса ухудшается, а именно, увеличивается на 22,5% максимальная динамическая ошибка.
Проведем оптимизацию параметров регулятора. Выбираем критерий ITAE.
Оптимальные значения:
Критерий Кр Ти
99,769 0,13327 4,9726
Моделирование переходного процесса САР при оптимальных параметрах (рисунок 15).
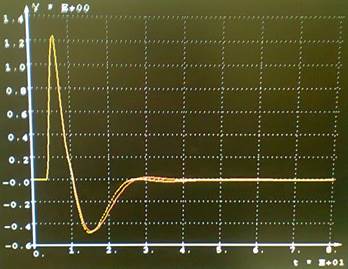
Рисунок 15 – Переходные процессы САР
Максимальная динамическая ошибка = 1,24011.
Степень затухания = 0,996185.
Время регулирования = 20,4000.
В результате получили переходной процесс с меньшим временем регулирования. Более высокое качество работы САР было достигнуто путем настройки регуляторов.
3.2 Исследование каскадной САР с опережающим импульсом
Задаем такие же параметры передаточной функции, какие были заданы при исследовании САР с односторонней проводимостью.
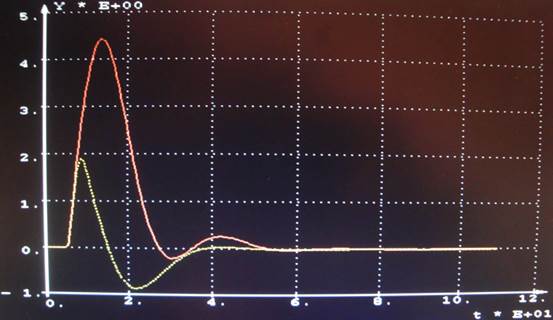
Переходной процесс САР с опережающим импульсом представлен на рисунке 16.
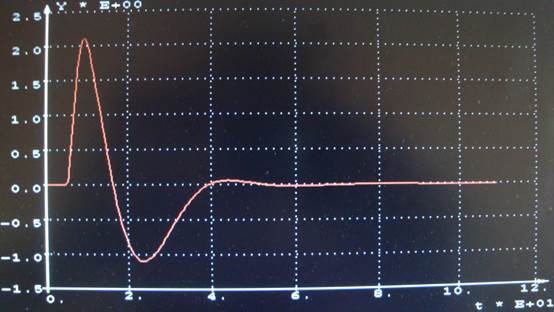
Рисунок 16 – Переходной процесс САР с опережающим импульсом
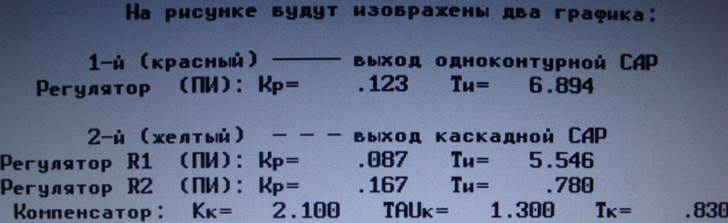
В меню «Экспресс-наладка САР» посмотрим рекомендуемые параметры регулятора (рисунок 17).
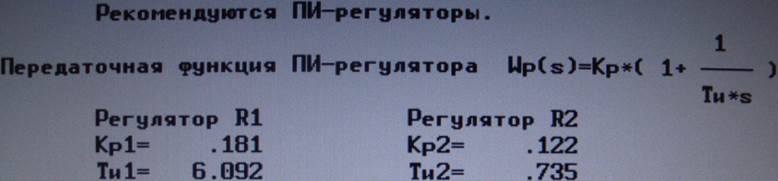
Рисунок 17– Рекомендуемые параметры регулятора
Расчет параметров регулятора. Выбран процесс с умеренным затуханием.
Параметры настройки регулятора:
Кр = 0,087; Ти = 5,546.
Выберем возмущение на входе объекта (по нагрузке).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.