Компенсатор, включаемый в цепь воздействия главного регулятора на задание корректирующему регулятору, представляет собой динамическое звено с передаточной функцией, являющейся оценкой передаточной функции опережающего участка объекта WОП(s). Т.к. эта оценка определяется в системе в виде инерционных звеньев 1-го и 2-го порядка, то компенсатор легко реализуется в современных контролерах. Кроме того, в данной схема предусматривается и непосредственное (помимо корректирующего регулятора) воздействия главного регулятора на исполнительный механизм, т.е. управляющее воздействие САР на исполнительный механизм U является суммой выходных сигналов главного и корректирующего регуляторов.
Наличие этих особенностей дает возможность производить настройку главного и корректирующего регуляторов независимо друг от друга, как в простой одноконтурной САР.
Другим достоинством данной САР является повышение ее эксплуатационной надежности за счет того, что при отказе корректирующего регулятора или любого другого элемента внутреннего контура регулирования, а также компенсатора выход корректирующего регулятора может быть отключен от исполнительного механизма , и схема продолжает работать как простая одноконтурная САР с главным регулятором (причем без необходимости ее перенастройки, т.к. главный регулятор уже был настроен на передаточную функцию объекта по каналу управляющего воздействия).
3 Ход работы
3.1 Исследование каскадной САР с односторонней автономностью
Введем параметры передаточной функций основного канала и опережающего участка в программу IPC-CAD.
Характеристики основного канала: Коб=3,0; Тоб=3,6; τоб=3,0.
Характеристики вспомогательного канала: Коб=1,5; Тоб=0,6; τоб=0,85.
Передаточные функции объекта представлены на рисунке 5.
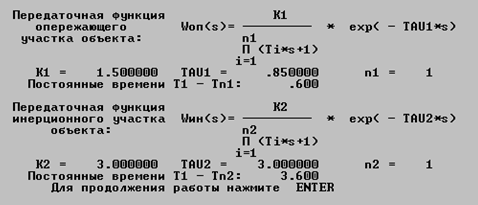
Рисунок 5 – Передаточные функции объекта
Переходной процесс исходной системы представлен на рисунке 6
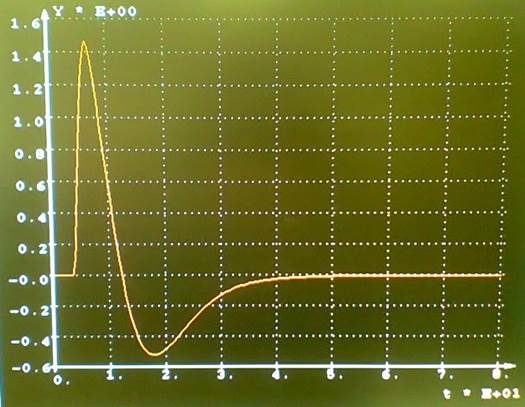
Рисунок 6 – Переходной процесс исходной системы
В меню «Экспресс-наладка САР» посмотрим рекомендуемые параметры регулятора САР и компенсатора (рисунок 7).
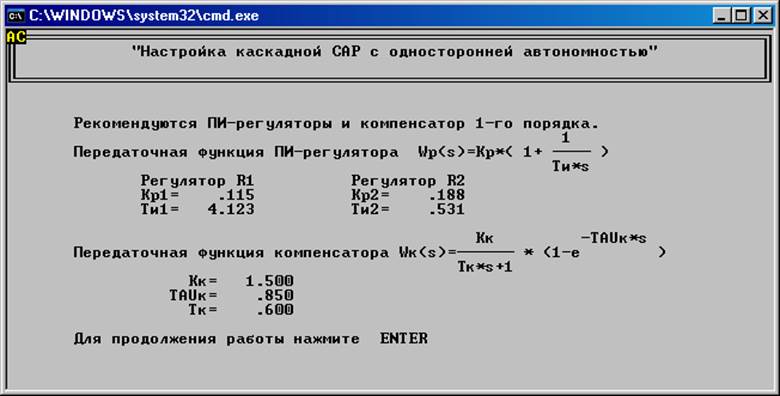
Рисунок 7 – Рекомендуемые параметры САР
Настроим регулятор одноконтурной САР. Процесс с умеренным затуханием, возмущение на входе объекта (по нагрузке), воздействие – скачок.
Переходной процесс регулятора изображен на рисунке 8
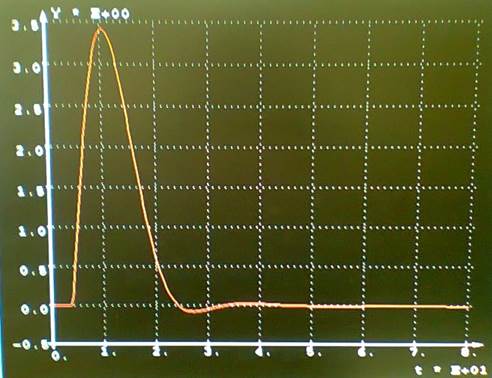
Рисунок 8 – Переходной процесс регулятора
Максимальная динамическая ошибка = 3,41802.
Степень затухания = 0,991901.
Время регулирования = 22,5250.
По рисунку 8 видно, что переходной процесс с перерегулированием.
Проверим САР на грубость и получим переходной процесс (рисунок 9).
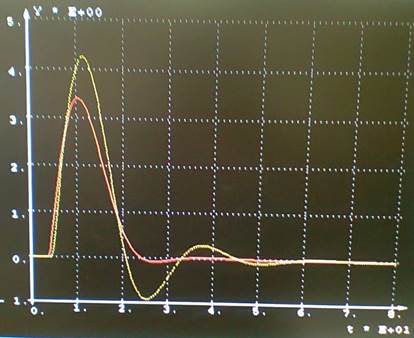
Сплошная – САР с исходным объектом; пунктир – САР с объектом, у которого коэффициент усиления и запаздывание увеличены на 20%.
Рисунок 9 – Проверка САР на грубость
Максимальная динамическая ошибка = 4,25683.
Степень затухания = 0,930905.
Время регулирования = 39,9500.
В результате увеличения коэффициента усиления и запаздывания на 20% максимальная динамическая ошибка увеличивается на 19,7%, а время регулирования увеличилось на 17,425 с (43,6%), следовательно, качество работы САР ухудшается.
Проведем оптимизацию параметров регулятора методом поиска. Критерием оптимальности выберем критерий ITAE, математическая запись которого имеет вид
Оптимальные значения:
Критерий Кр Ти
397,10 0,16439 5,0544
Графики переходных процессов исходной системы и системы с оптимальными параметрами представлены на рисунке 10.
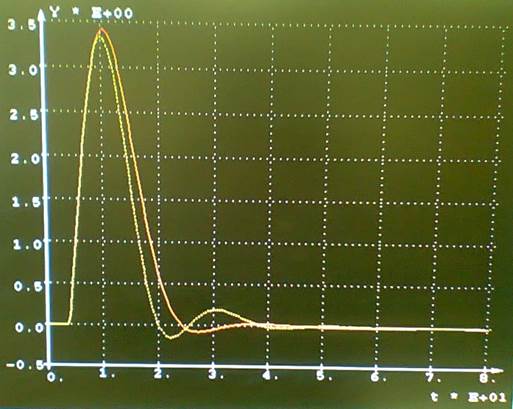
Сплошная – выход САР при исходных значениях;
пунктир – выход САР при оптимальных значениях.
Рисунок 10 – Переходные процессы
Максимальная динамическая ошибка = 3,33813.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.