Подставив выражение ![]() в уравнения (7) и (8), получим однородную
систему уравнений с соответствующими начальными и конечными условиями, решая
которую находим оптимальные траектории движения системы
в уравнения (7) и (8), получим однородную
систему уравнений с соответствующими начальными и конечными условиями, решая
которую находим оптимальные траектории движения системы ![]() и
и
![]() .
.
Выразив ![]() через
через ![]() и
и ![]() , находим оптимальное программное
управление
, находим оптимальное программное
управление ![]() . Если исключить время из
. Если исключить время из ![]() ,
, ![]() и
и ![]() , то можно найти
, то можно найти ![]() (оптимальное
управление с обратной связью).
(оптимальное
управление с обратной связью).
Однако следует иметь в
виду, что наша задача является, так называемой, двухточечной краевой задачей,
т.к. значения ![]() задаются в моменты времени t0 и tk. Если аналитическое решение системы уравнений (7)-(9)
встречает трудности (а на практике это повсеместно), то необходимо использовать
численные методы решения дифференциальных уравнений. Для оценки итеративной процедуры
выбора
задаются в моменты времени t0 и tk. Если аналитическое решение системы уравнений (7)-(9)
встречает трудности (а на практике это повсеместно), то необходимо использовать
численные методы решения дифференциальных уравнений. Для оценки итеративной процедуры
выбора ![]() целесообразно ввести некоторый функционал
оценки близости, например:
целесообразно ввести некоторый функционал
оценки близости, например:
|
|
(10) |
Практическое занятие 2
Уравнение Эйлера и его применение для решения задач
оптимального управления
Для нахождения функции U(t), доставляющей экстремум функционалу
|
|
(11) |
уравнение Эйлера имеет вид
|
|
(12) |
где  ,
,  .
.
В большинстве технических приложений вариационного исчисления функции, доставляющие экстремум функционалу, подчинены некоторым дополнительным условиям (уравнениям связи).
Для задач управления – это уравнения управляемого объекта вида
|
|
(13) |
Для решения вариационных задач в этом случае используют метод неопределенных множителей Лагранжа, суть которого состоит в том, что уравнения Эйлера составляют для вспомогательной скалярной функции, называемой гамильтонианом:
|
|
(14) |
где ![]() –
множители Лагранжа.
–
множители Лагранжа.
Функция U(t) и множители ![]() , …,
, …, ![]() находят из системы (n+1) уравнений: уравнение Эйлера для
функции (14) и n уравнений
(13) математической модели объекта. Сформулированную задачу на условный
экстремум называют общей задачей Лагранжа.
находят из системы (n+1) уравнений: уравнение Эйлера для
функции (14) и n уравнений
(13) математической модели объекта. Сформулированную задачу на условный
экстремум называют общей задачей Лагранжа.
Рассмотрим пример применения уравнений Эйлера для решения задач оптимального управления.
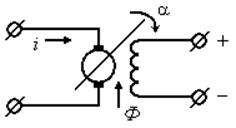
Пример: управление двигателем постоянного тока. Допустим, что имеется возможность управления током якоря двигателя постоянного тока с независимым возбуждением (рис. 1). Примем, что магнитный поток Ф неизменен. В этом случае угол поворота a двигателя связан с током через дифференциальное уравнение равновесия моментов на валу
|
|
(15) |
где i – ток якоря – управляющее воздействие; c – коэффициент; Ф – магнитный
поток; J – момент инерции якоря и нагрузки,
приведённый к валу двигателя;
Mc – момент сопротивления; a – угол поворота вала двигателя –
управляемая координата; t
– реальное время.
|
|
|
Рис. 1. Двигатель постоянного тока |
Для простоты дальнейших
выкладок примем, что моментом сопротивления можно пренебречь, т.е. Mc = 0. Кроме того, вместо реального
времени t введём относительное время  . В этом случае уравнение (15) примет
вид
. В этом случае уравнение (15) примет
вид
|
|
(16) |
Учитывая принятые обозначения: У – управляемая координата, а U – управляющее воздействие, введём замену i = Uи a = Y. С учётом такой замены окончательно запишем уравнение управляемого объекта
|
|
(17) |
Рассмотрим задачу об оптимальном управлении электропривода при минимальных затратах энергии. Функционал (критерий оптимальности) определяется выражением:
|
|
(18) |
Уравнение объекта имеет вид
|
|
граничные условия по скорости нулевые
|
|
(19) |
и задана величина отрабатываемого угла
|
|
(20) |
Если ввести обозначения
то, (17)-(19) можно переписать
|
|
(21) |
|
|
|
(22) |
|
|
|
(23) |
|
|
|
(24) |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 .
. ,
, ,
, ,
, ,
,
 .
. .
. .
. ,
, .
. ,
, .
.