Лекция 5.
1. Анализ ПП в цифровых СУ.
2. Устойчивость цифровых СУ.
3. Оценка запаса устойчивости цифровых СУ.
Анализ ПП в цифровых СУ
Модель СУ с цифровым регулятором можно свести к виду:
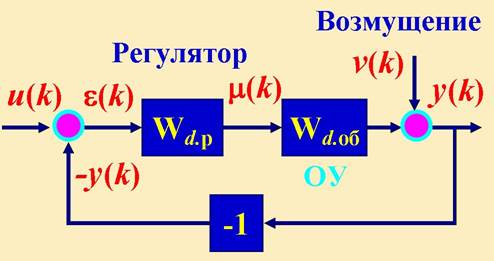
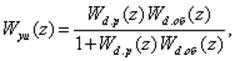
Для этой СУ Z-изображения последовательностей входных u(k), v(k) и выходных y(k) импульсов связаны так:
![]()
где
![]()
Для определения Z-изображения V(z), приведенного к выходу дискретного ОУ возмущения v(k), которое обусловлено действием на непрерывный ОУ реального возмущения l(t), нужно найти S-изображение приведенного возмущения V(s)
![]()
где Wоб.в(s) - ПФ ОУ по каналу возмущения l(t), а L(s) - изображение l(t).
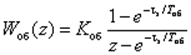
Пример 2. Пусть СУ имеет ОУ- инерционное звено I порядка с ДПФ (см. пример 1)
и цифровой И-регулятор с ДПФ
![]()
Найдем последовательность y(k) выходных импульсов при ступенчатом возмущении l(t) = l0·1(t), действующем на ОУ со стороны регулирующего органа.
![]()
Тогда
ДПФ замкнутой СУ
где
![]()
Поэтому Z-изображение последовательности y(k) выходных импульсов равно:
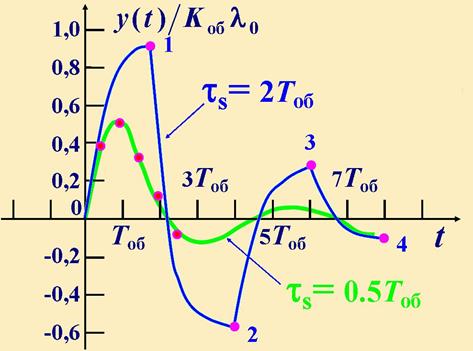
Если взять ts /Tоб = 2 и kи Kоб =2.092 (это соответствует степени затухания основной компоненты собственных колебаний СУ, равной 0,9), то
Деление числителя на знаменатель («углом» или программно на ЭВМ) дает следующий ряд:
![]()
Числовая последовательность этого ряда равна
![]()
![]()
![]()
![]()
Для ts /Tоб = 0,5 и kи Kоб = 1.01 (степень затухания тоже равна 0,9) после аналогичных вычислений получим:
![]()
![]()
![]()
![]()
![]()
ПП в СУ, построенные по этим дискретным значениям выходной величины, показаны ниже.
Устойчивость цифровых СУ
Для оценки их устойчивости используются те же критерии, что и для непрерывных СУ.
Критерий Рауса-Гурвица.
Для устойчивости непрерывных СУ нужно, чтобы полюса ПФ замкнутой СУ (корни характеристического уравнения 1 - Wр.с(s) = 0) находились в левой полуплоскости комплексной плоскости.
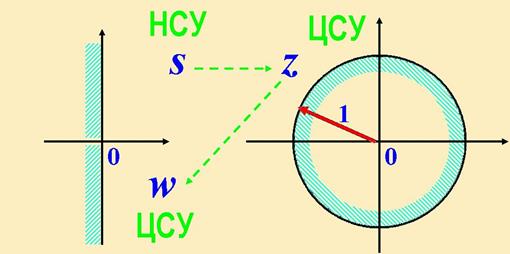
Для оценки устойчивости дискретных СУ используют уравнение 1 - Wр.с(z) = 0. Необходимо и достаточно, чтобы все корни уравнения по модулю были меньше 1, т.е. находились на комплексной плоскости z внутри круга единичного радиуса с центром в начале координат.
Чтобы пользоваться обычными критериями устойчивости Рауса-Гурвица нужно сделать подстановку в характеристическое уравнение z = ( w + 1)/( w - 1) .
Области устойчивости непрерывных
и цифровых СУ по критерию Гурвица
Критерий Михайлова.
Заменой z= exp ( jtsw) из характеристического полинома F(z) получают характеристический вектор СУ
![]()
Согласно критерию Михайлова дискретная СУ устойчива, если годограф характеристического вектора, начинающегося на вещественной положительной полуоси при изменении w от w = 0 до w = p/ts , совершает поворот против часовой стрелки на угол np, проходя последовательно 2n квадрантов комплексной плоскости.
Критерий Найквиста.
Если отрицательная АФХ разомкнутой дискретной СУ при изменении частоты w от w = –p/ts до w = p/ts не охватывает точки –1, j0 , то СУ, устойчивая в разомкнутом состоянии, сохранит свою устойчивость и после замыкания ее обратной связью.
Если Z-характеристическое уравнение разомкнутой СУ имеет один корень, равный 1 (что обычно бывает при наличии И-составляющей закона регулирования), то для оценки устойчивости по критерию Найквиста необходимо АФХ при частоте w = 0 дополнить дугой бесконечно большого радиуса.
Если дискретная СУ не устойчива в разомкнутом состоянии, то для ее устойчивости в замкнутом состоянии необходимо и достаточно, чтобы отрицательная АФХ разомкнутой СУ при изменении частоты от w = –p/ts до w = p/ts kраз охватывала точку –1, j0 ( где k - число корней характеристического уравнения разомкнутой СУ, расположенных вне окружности единичного радиуса).
Расчет параметров настроек регуляторов
в одноконтурных САР
выполняют следующими способами:
Ä по приближенным формулам;
Ä графо-аналитическим способом на основе АФХ объекта и М-критерия (показателя колебательности);
Ä по расширенным АФХ;
Ä с помощью мат. моделирования.
На практике настройки регуляторов определяют по приближенным формулам, а затем уточняют в процессе настройки САР прямо на ОР.
Оптимальные настройки регуляторов для статических ОР первого порядка с запаздыванием для ПП:
1 - апериодического;
2 - с 20%-м перерегулированием;
3 - с мин ò y2dt - приведены ниже.
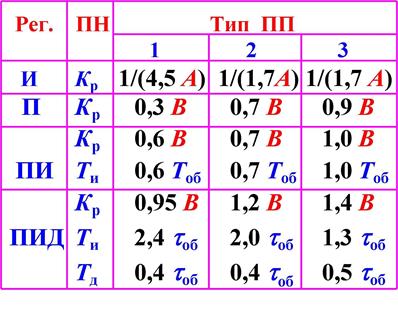
В таблице приняты обозначения:
А = Коб Тоб;
В = Тоб /(Кобtоб).
Более точно настройки определяют по выбранной мат. модели - АФХ ОР - с тем, чтобы достигнуть заданного затухания переходного процесса в САР, характеризуемого частотным показателем колебательности М.
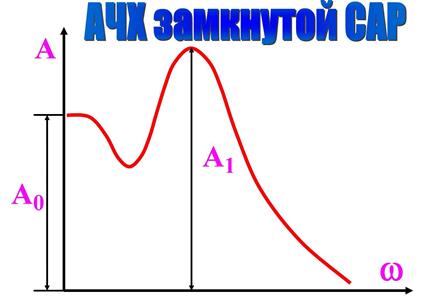
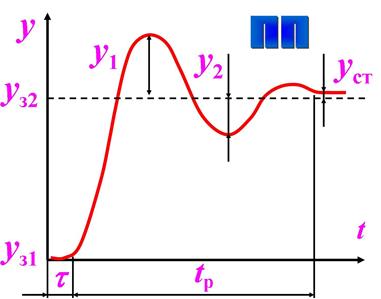
Показатель М равен отношению максимального А1 и начального А0 значений АЧХ замкнутой САР
M = А1/А0.
Показатель колебательности M и перерегулирование h = y2/y1 при возмущении по нагрузке связаны между собой следующим образом:
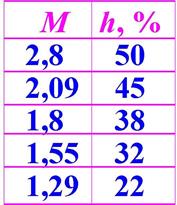
Значение M обычно выбирают в пределах 1,1 - 2,4.
Для типовых ПП M равно:
1,1 - при апериодическом ПП;
1,3 - при 20%-м перерегулировании;
2,1 - при процессе с min ò y2 dt.
Метод графического расчета настроек
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.