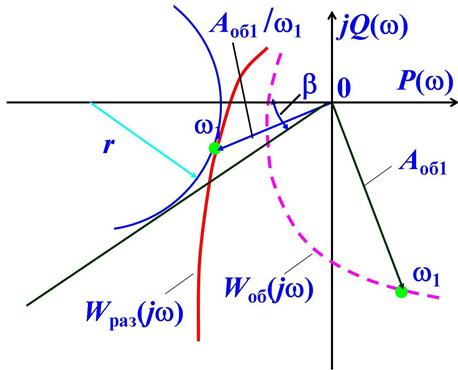
основан на том, что АФХ разомкнутой САР
Wраз(jw) = Wоб(jw) Wр(jw)
должна касаться окружности с заданным значением М.
Радиус этой окружности r = M 2/(M 2-1), а ее центр лежит на отрицательной вещественной полуоси.
Определение настроек ПИ-регулятора
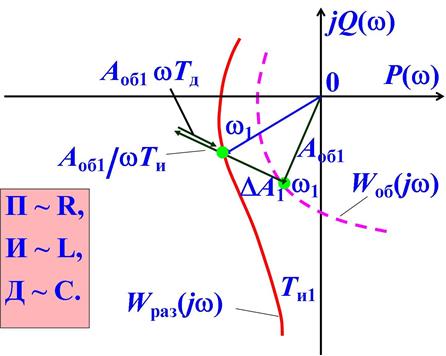
По АФХ объекта Wоб(jw) строят АФХ разомкнутой САР при коэффициенте передачи пропорциональной части регулятора Кр = 1 и нескольких значениях времени изодрома Tи:

Для построения АФХ разомкнутой системы при Кр = 1 и при некотором значении Tи нужно к каждому вектору АФХ ОР прибавить вектор с модулем D А = Аоб/wTи (Аоб - модуль вектора АФХ объекта), повернутый на 90 0 по часовой стрелке.
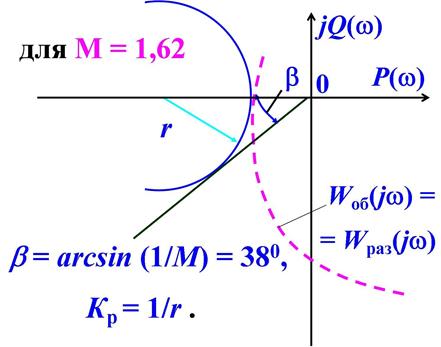
Под углом b = arcsin (1/M) проводят луч и строят окружности с центрами на отрицательной вещественной полуоси.
Эти окружности должны касаться одновременно луча и АФХ Wраз(jw) для разных значений Tи. Значение коэффициента передачи Кр для каждого значения Tи определяют по формуле:
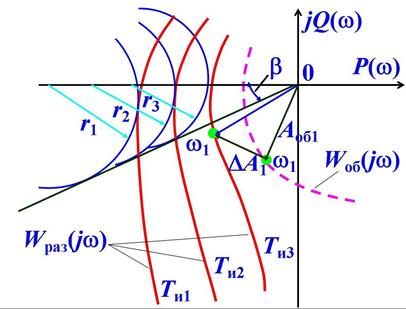
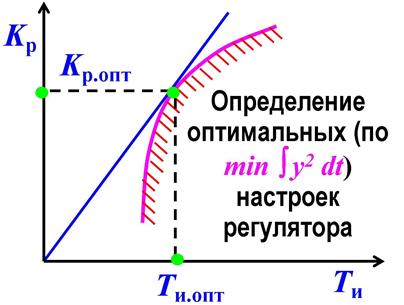
В плоскости параметров настройки Кр - Tи строят границу, на которой показатель колебательности ПП равен заданному значению М.
Оптимальным
настройкам соответствует точка с максимальным соотношением
Кр /Tи, получаемая в месте касания прямой,
проходящей через начало координат.
Определение настроек П-регулятора
АФХ разомкнутой САР при Кр = 1 совпадает с АФХ объекта, но безразмерна. Остальные построения аналогичны построениям при определении параметров настроек ПИ-регулятора.
Часто расчет ведут для М = 1,62 (h » 34%).
Тогда
Определение настроек И-регулятора
АФХ разомкнутой САР при Кр1 = 1

Остальные построения аналогичны.
Определение настроек ПИД-регулятора
По АФХ объекта Wоб(jw) строят АФХ разомкнутой САР при коэффициенте передачи пропорциональной части регулятора Кр = 1 , нескольких значениях времени изодрома Tи и времени предварения Tп = 0,5 Tи:

Расчет по расширенным АФХ
Производят на заданное качество ПП, определяемого степенью колебательности m = a /w(в пределах 0,22 – 0,4).
Расширенная АФХ получается из ПФ подстановкой s = (j - m) w. Для получения этих АФХ экспериментальным методом необходимо на вход ОР подавать периодические возмущения с затухающей амплитудой
![]()
или в показательной форме
![]()
Степень
затуханияx = (Аi - Аi +1)/ Аiи
показательmсвязаны выражением![]()
Обычноx = 0,75 - 0,9.
Для расчета настроек регулятора используют выражение, подобное критерию Найквиста
![]()
Откуда можно получить формулы для расчета регуляторов на заданное m.
Для ПИ-регулятора


Расчет настроек ведут для нескольких значений частоты и в плоскости параметров Кр - Tи строят линию равного значения m. Оптимальные настройки находят также по [3, 8].
САР работоспособна, если она обеспечивает необходимое качество регулирования и обладает устойчивостью. Устойчивость САР определяется на основе критериев устойчивости или путем моделирования.
Проверка на робастность
Зачастую параметры ОР определены с ошибкой или изменяются во времени. В этих условиях необходимо проверить рассчитанную САР на нечувствительность (грубость, робастность [robustness]) к возможным вариациям параметров системы для наихудших условий - увеличению коэффициента передачи Коб и запаздывания tоб ОР.
Для этого оценивают возможные отклонения параметров ОР, регулятора и проверяют САР с новыми параметрами на устойчивость известными методами.
Иногда устанавливают границы изменения различных параметров ОР и регулятора, при которых САР остается устойчивой, а ПП - отвечает заданным требованиям.
Оценка запаса устойчивости цифровых СУ
Производится с помощью корневого и частотного показателей колебательности известными из ТАУ методами.
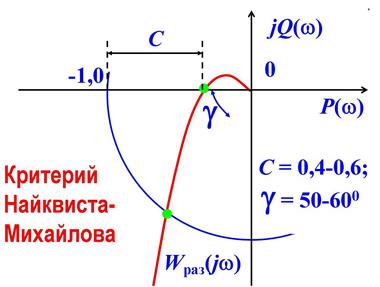
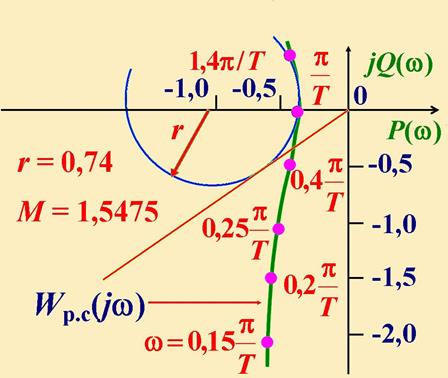
Пример 3. Для СУ из примера 2 при ts / Tоб = 2 и kи Kоб =2.092 (степень затухания y = 0,9, частотный показатель колебательности М = 1,5475) выполним графические построения АФХ разомкнутой цифровой СУ.
Под углом g = arcsin (1/M) проведем луч из начала координат, а затем окружность, касающуюся одновременно АФХ и луча, с центром на вещественной оси. Предельное значение коэффициента передачи регулятора равно
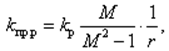
где r- радиус окружности; kр - значение коэффициента передачи регулятора, при котором построена АФХ (обычно выбирают kр = 1).
В данном случае:
g = 40015’, kпр.р = 1,1095 kр / r.
Из графика выше r= 0,74.
kпр.и = 1,1095 ·1/ 0,74 = 1,5.
В цифровых СУ можно выбрать ПФ регулятора так, чтобы Z- характеристическое уравнение замкнутой СУ имело вид
![]()
а все остальные коэффициенты от dl -1 равнялись нулю. Тогда ПФ замкнутой СУ принимает вид конечного ряда
![]()
Такие СУ имеют бесконечно большую степень устойчивости, так как корни s-характеристического уравнения имеют бесконечно большую вещественную составляющую при z-корнях равных нулю. Они позволяют осуществить ПП за конечное число интервалов квантования и называются СУ с конечным временем ПП. Возможен переход за 1 интервал квантования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.