Лекция 3а.
1. Дискретные системы.
2. Разностные ур-я “вход-выход”.
3. Взвешенная временная последовательность.
4. Разностные ур-я в переменных состояния.
5. Z-преобразование, в т.ч. и запаздывания.
6. ПФ и АФХ дискретных СУ.
Дискретные системы
В основе современных СУ лежат УВМ и микропроцессорные контроллеры, обмен информацией между которыми происходит в дискретные моменты времени. СУ с такими элементами называют дискретными или непрерывно-дискретными. При этом время tпринимает дискретное множество значений tk(k = 0, 1, 2, … ,). Обычно интервал ts = tk+1 - tk = const.
Тогда любой дискретный сигнал будет функцией аргумента k
u(tk) = u(kts) = u(k).
Если для описания непрерывных СУ используют ДУ, то для дискретных СУ - разностные уравнения.
Пусть нужно найти значение выходной переменной у, связанной с входной величиной u соотношением
![]()
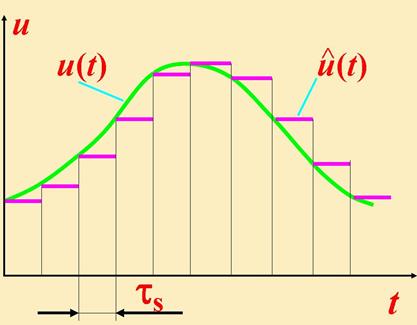
Заменяя непрерывную функцию u(t) на кусочно-постоянную
![]() ,
,
получим
После манипуляций можно получить разностное уравнение 1-го порядка
![]()
Т. о., для определения значения y в последующий момент (k + 1) ts необходимо запоминать его предыдущее значение в момент y(kts ) и значение u(kts ) в данный момент.
Линейные дискретные системы можно описать:
– разностными уравнениями «вход-выход»;
– взвешенной временной последовательностью;
– разностными уравнениями в ПС.
Разностные уравнения “вход-выход”
![]() (4)
(4)
Число y(k) - выход в момент kts (шаг дискретности ts для простоты описания формул обычно опускают).
Числа y(k-1), y(k-2) - предыдущие значения выхода, запоминаемые в памяти ЭВМ. Числа u(k) , u(k-1) - значения входа в моменты k, (k-1), также запоминаемые в ЭВМ.
Уравнение (4) - рекурсивное или разностное уравнение. Оно позволяет вычислять каждое последующее значение выхода системы по предыдущим данным.
Взвешенная временная последовательность
Это аналог импульсной переходной функции для дискретных систем. В них на вход вместо дельта-функции, а подают дельта-последовательность (Д-П) Кронекера
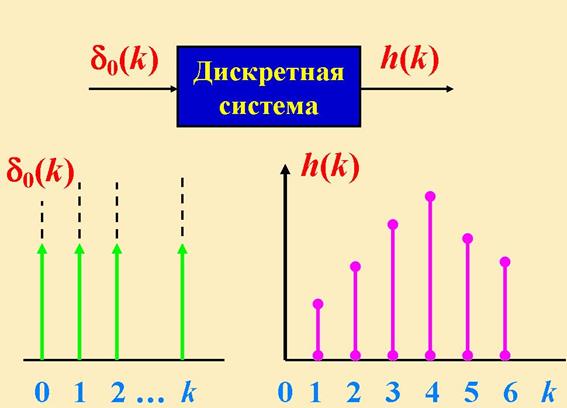
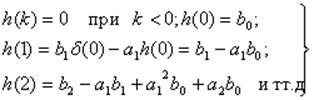
Приняв в (4) u(k) = d0(k) и обозначив реакцию системы через h(k), получим выражение для взвешенной временной или весовой последовательности
![]()
Вычисления h(k) начинают с k = 0,
 (6)
(6)
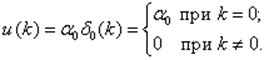
Пусть на вход подана Д-П
Тогда y0(k) = a0h(k), где y0(k) - взвешенная (множителем a0) реакция системы на Д-П, приложенную в момент k = 0. Реакция системы y1(k) на Д-П, приложенную в момент k = 1.
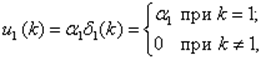
будет равна y(k) = 0 при k < 1;
 (7)
(7)
и т.д.
y1(k) = a1 h(k-1).
Если Д-П приложена в момент k = j, а
то реакция системы
 (8)
(8)
и т.д.
Пусть подана сумма Д-П, приложенных в моменты k = 0, 1, 2, … ,
или
![]()
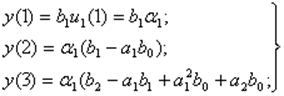
Тогда на основе принципа суперпозиции выход системы будет равен сумме реакций от входов u(0), u(1), u(2), …
Или с учетом (8)
 (9)
(9)
Произведя замену m = (k - j), получим аналог интеграла свертки для непрерывных систем
 (10)
(10)
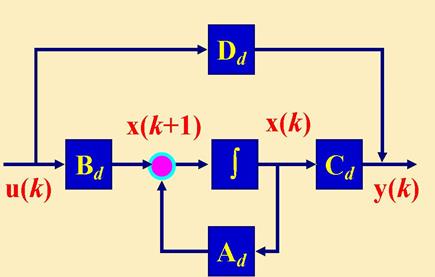
Разностные уравнения в переменных состояния
Для дискретных систем вместо ДУ используют разностные уравнения c шагом дискретности ts , который обычно опускают, при х(0) = х0
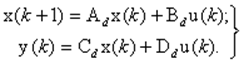 (11)
(11)
Решение уравнения (11) получим, подставляя k = 0, 1, 2, … .
![]()
![]()
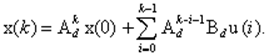 (12)
(12)
Матрицу j(k) = Аdk- называют фундаментальной или переходной матрицей.Подставим j(k) в (12) и получим
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


