 (13)
(13)
Первый член зависит только от начальных условий х0 , второй - только от воздействия ui . Выход системы согласно (11) и (13) равен
 (14)
(14)
Для системы, описываемой разностными уравнениями в переменных состояния, можно найти взвешенную временную последовательность, т.е. реакцию системы h(k) при нулевых начальных условиях x(0) = 0 и входе в виде Д-П
Последовательно решая уравнения (11) при Dd = 0, k= 0, 1, 2, … , получим
Т. е.
 (15)
(15)
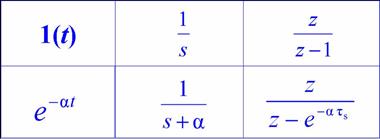
Z-преобразование
Оно сводит решение разностных уравнений системы к алгебраическим операциям и устанавливает соответствие между функциями дискретного времени и функциями комплексного переменного z. Для последовательности f(k) при положительных k используют одностороннее Z-преобразование, для положительных и отрицательных k- двухстороннее.
Они имеют вид
Обратное преобразование находят по формуле

где Г - замкнутый контур в z-плоскости, обычно окружность единичного радиуса с центром в начале координат;
z = exp (tss).
Для упрощения вычисления дискретной ПФ (ДПФ) используют приближенные формулы.
Простейшее преобразование осуществляют с помощью формулы
s = (z - 1) / ts z. (16)
Более точный переход к ДПФ - с помощью аппроксимации Тастина (Tustin) - билинейной аппроксимации
ДПФ Wd(z) из непрерывной ПФ W(s) получается подстановкой
 (17)
(17)
Замена (16) соответствует численному интегрированию по методу прямоугольников, подстановка (17) - по методу трапеций.
Для обеспечения соответствия между непрерывным и дискретным частотным откликом на частоте w
![]()
используют аппроксимацию Тастина с модифицированной частотой
 (18)
(18)
В справочной литературе приводятся таблицы Z-преобразования и модифицированного Z-преобразования
Z-преобразование запаздывания
В ОУ с запаздыванием сигнал, модулирующий последовательность импульсов, может запаздывать точно на целое число периодов t = rts .
В этом случае ДПФ ОУ Wt(z) будет равна ДПФ ОУ W0 (z) без запаздывания, умноженной на z-r
![]()
Если
запаздывание составляет только часть периода квантования t = λts
( 0 < λ < 1) , то формула одностороннего Z-преобразования
меняет свой вид

Для удобства расчетов вводят параметр с = 1 - λ . Тогда

Для нахождения F(z,c) существуют таблицы модифицированного Z-изображения.
В общем случае при произвольном запаздывании находят число rцелых периодов квантования на интервале t и параметр с из соотношения
![]()
Тогда ДПФ ОУ с запаздыванием будет равна
![]()
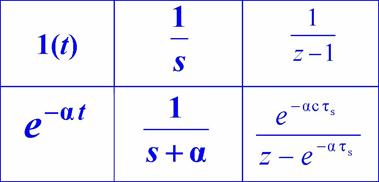
Примеры модифицированного Z-преобразования
ПФ и АФХ дискретных СУ
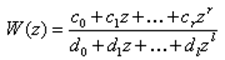
Применяя преобразование Лапласа к (4) и проводя замену z= exp (tss), получим ДПФ системы в общем виде
Умножая числитель и знаменатель на z в положительной степени, равной наибольшей отрицательной степени, получим ДПФ в привычном виде
Частотные
характеристики дискретных систем получают из ДПФ заменойz= exp (jtsw).
Эти характеристики являются периодическими функциями частоты с периодом
ws = 1/ (2tps):
![]()
Пример 1. В СУ есть дискретный ОУ - непрерывный ОУ и ЦАП (ZOH) с ПФ
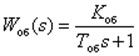
![]()
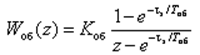
Из таблиц Z-преобразования ДПФ ОУ
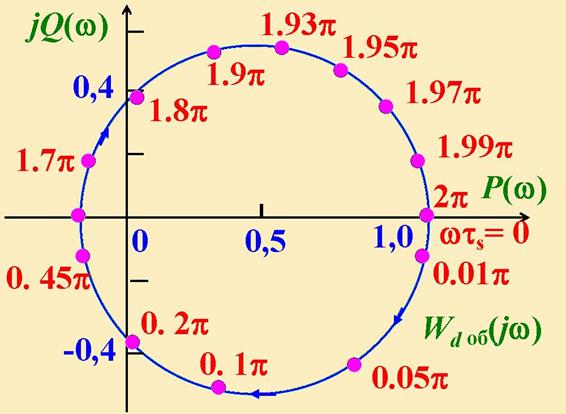
Тогда АФХ дискретного ОУ равна
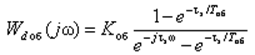
Из этого выражения можно найти АЧХ и ФЧХ дискретного ОУ. Задавшись значением
![]()
получим АФХ
Если непрерывный ОУ имеет запаздывание, содержащее целое число r периодов квантования t = rts, то его ДПФ
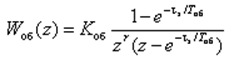
Если запаздывание ОУ t, не является кратным периоду квантования ts, то необходимо использовать модифицированное Z-преобразование. Тогда

где r- целое число периодов квантования. АФХ ОУ с запаздыванием
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.