самыми простыми для трехподвижного пространства, в котором существует исследуемый механизм, и, значит, они не могут иметь в своем составе другие более простые группы Ассура.
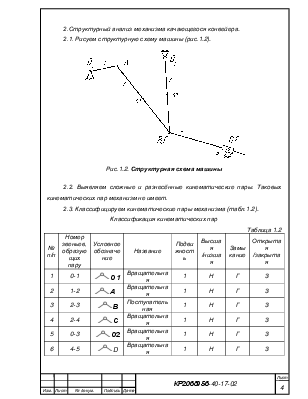
2.18. Проводим классификацию структурных групп по И.И. Артоболевскому (табл.1.4).
Классификация структурных групп
Таблица 1.4
|
№ п/п |
Структурная схема |
Номер звеньев, образующих группу |
Класс, порядок, вид |
||||||||||
|
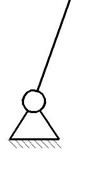
1 |
|
0-1 |
Механизм I класса |
||||||||||
|
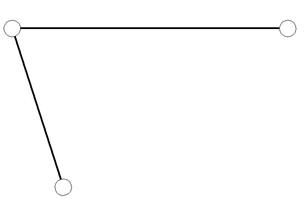
2 |
|
2-3 |
II класс 2 порядок 1-вид |
||||||||||
|
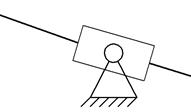
3 |
|
4-5 |
II класс 2-порядок 3-вид |
2.19. Определяем класс сложного механизма. Механизм относится ко II классу.
2.1. Определение крайних положений механизма аналитическим методом
2.1.1. Начальное положение.
Это положениереализуется, когда звенья О1А и АВ выстраиваются в одну линию, причем О1В = АВ–О1А.
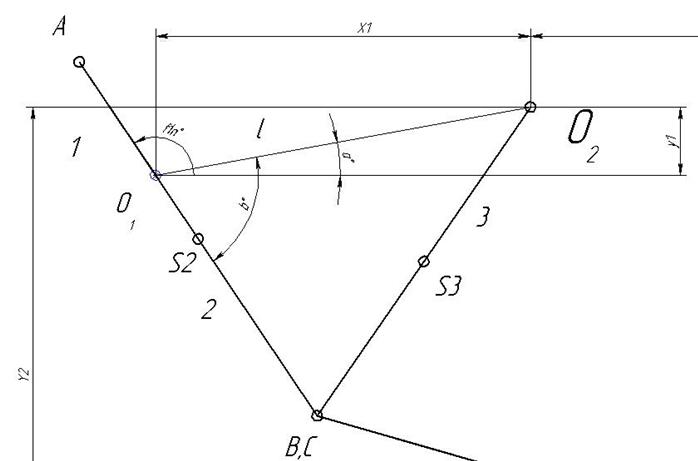
jн =p-b+a,
где 
Ð β найдем из ΔО1ВО2
Из условия
следует, что ![]() м
м
По теореме
косинусов: из ΔО1ВО2
следует, что ![]() ,
,
где 
![]()
Тогда jн = p-b+a = 124°
2.1.2. Конечное положение
Это положение реализуется, когда звенья О1А и АВ выстраиваются в одну линию, причем О1В = АВ + О1А.
jк
= 360°+a-b‘,
где![]() найдено
в п. 2.1.1
найдено
в п. 2.1.1
b‘ – найдем из ΔО1BО2
O1О2 = 0,615 (см. п. 2.1.1)
По теореме
косинусов ![]() ,
,
где 
![]()
jк = 360+a-b‘ =328,80
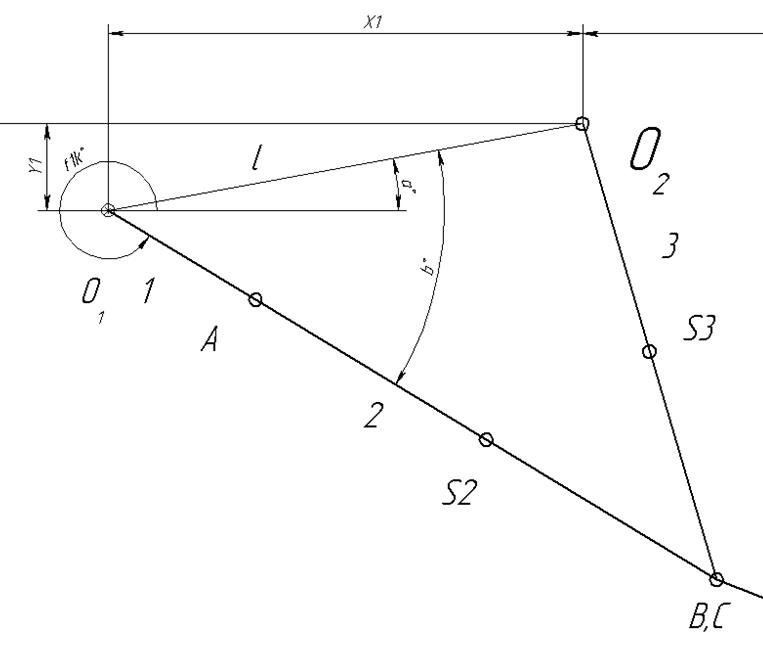
2.2. Определение положений звеньев механизма.
Положения звеньев механизма можно найти с помощью графического или аналитического метода.
2.2.1. Графическое построение планов положения исследуемого механизма.
Выбираем масштабный коэффициент длин m = 0,22/64=0,0034375 м/мм и рассчитываем чертежные размеры звеньев (табл. 2.1).
Таблица 2.1
|
О1А |
АВ |
ВО2 |
Х1 |
Y1 |
X2 |
Y2 |
|
|
l1 |
l2 |
l3 |
x |
y |
X2 |
Y2 |
|
|
м |
0,22 |
0,6875 |
0,605 |
0,605 |
0,11 |
0,8 |
0,825 |
|
мм |
64 |
200 |
176 |
176 |
32 |
232 |
240 |
Планы механизма на чертеже строим следующим образом:
- Отмечаем на чертеже неподвижные точки О1, O2 и, рисуем в них вращательные кинематические пары.
- Проводим траектории движения: точки А – окружность радиусом О1А из т. О1; точки В – дугу радиусом О2В из т. О2;.
- Отмечаем крайние положения механизма:
Отсчитывая от начального положения звена 5, откладываем точку на h=0,4Н=59,9мм – соответствующую закону изменения силы Fc. С помощью обратного построения определяем дополнительное положение механизма.
Результаты расчета положений звеньев.
 Таблица 2.2
Таблица 2.2
|
Величина Метод |
j10 |
j20 |
j30 |
j40 |
l4.м |
S2x .м |
S2y. м |
S3x. м |
S3y м |
|
Аналитический |
213,96 |
330,24 |
251,63 |
165,79 |
1.022 |
0.116 |
-0.294 |
-0.095 |
-0.287 |
|
Графический |
214 |
330 |
252 |
166 |
1.02 |
0.115 |
-0.294 |
-0.095 |
-0.287 |
|
Отклонение |
0,02 |
0,07 |
0,15 |
0,14 |
0.27 |
0.86 |
0 |
0 |
0 |
Погрешность не превышает инженерной (5%), следовательно, расчеты можно считать верными.
2.2.2. Определение положений аналитическим методом.
Определяем методом векторных замкнутых контуров. В качестве расчетного положения выбираем положение 4.Рисуем схему в расчетном положениии составляем векторные контуры для расчета.
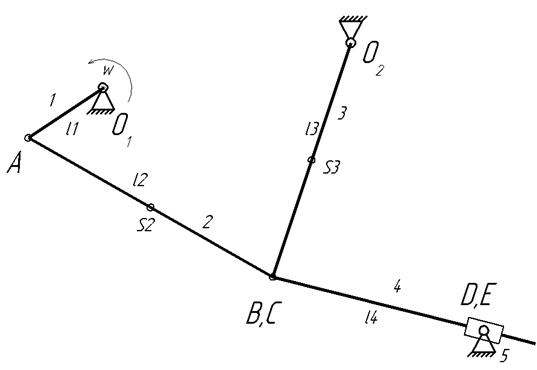
Рисунок 2.3 Схема механизма в расчетном положении
Первый векторный контур:
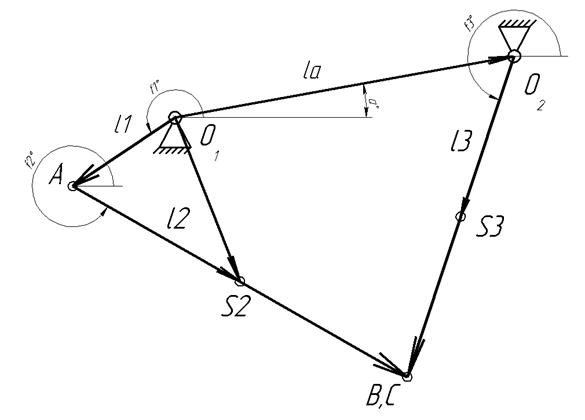
Рисунок 2.4 – Первый векторный контур
![]() Проецируем
на оси координат:
Проецируем
на оси координат:
![]()
![]()
![]() (2.1)
(2.1)
Проведем замену:![]()
![]()
Тогда система примет вид:
![]()
![]()
![]() (2.2)
(2.2)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для решения тригонометрического уравнения произведем замену:
 и
и  примем
примем

тогда
![]()
![]() или
или ![]()
![]()
![]()
Выбираем Ðj3 , лежащий во 3-ой четверти:
Рассчитываем
значения j2 и j3 в расчетном
положении, решая систему при ![]()
а = -0,787; в = -0,233; с =0,469; Д = 1,817;u = -1,386 получим:
![]() ;
; ![]()
Значения φ1 , φ2 , φ3 заносим в таблицу 2.2
Второй векторный контур:
![]()
В проекциях на оси координат:
![]()
![]()
![]() (2.3)
(2.3)
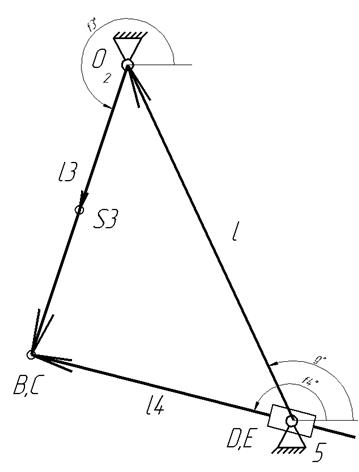
Рисунок 2.5 второй векторный контур
g=π-arctan(Y2/X2)=134° l=1,149м
Заметим, что в системе (3) два неизвестных: l4 и φ4.
Систему решаем методом вычитания угла из аргументов всех тригонометрических функций.
l4×sin(j4)=l3×sin(j3)+l×sin(g)
l4×cos(j4)=l3×cos(j3)+l×cos(g)
Делим первое уравнение на второе почленно
tg(j4)= l3×sin(j3)+l×sin(g) / l3×cos(j3)+l×cos(g) или :
j4=p+arctg(l3×sin(j3)+l×sin(g) / l3×cos(j3)+l×cos(g))
l4=(l3×sin(j3)+l×sin(g)) / sin(j4)
В расчетном положении:
l4 = 1.022м φ4 = 165.79°
Заносим значения l4, и φ4 в таблицу 2.2.
Система уравнений для определения координат центра тяжести звена3:
S3x = 0.5×l3×cos(j3)
S3y = 0.5×l3×sin(j3) (2.4)
![]()
![]()
![]() Векторный
контур для определения координат центра
тяжести звена2
(рисунок 2.4):
Векторный
контур для определения координат центра
тяжести звена2
(рисунок 2.4):
l1 + 0.5×l2-O1S2 = 0
В проекциях на оси координат:
l1×cos(j1) + 0,5×l2×cos(j2) - S2x = 0
l1×sin(j1) + 0.5×l2×sin(j2) – S2y =0
S2x = l1×cos(j1)+0.5×l2×cos(j2)
S2y = l1×sin(j1)+0.5×l2×sin(j2) (2.5)
Dрасчетном положении:
S2x = 0.116м S2y = -0.294м S3x = -0.095м S3y = -0.287м
Заносим значения в таблицу 2.2.
В остальных положениях координаты и углы рассчитаны в MathCAD и результаты расчетов сведены в таблицу 2.3.
Результаты расчёта положений звеньев
Табл. 2.3.
|
пол |
f1° |
f2° |
f3° |
f4° |
l4, м |
s2x, м |
s2y, м |
s3х, м |
s3y, м |
|
0 |
123.96 |
303.96 |
235.36 |
164 |
1.19 |
0.069 |
-0.103 |
-0.172 |
-0.249 |
|
1 |
153.96 |
313.83 |
237.34 |
164.31 |
1.17 |
0.04 |
-0.151 |
-0.163 |
-0.255 |
|
2 |
182 |
322.47 |
242.47 |
165.01 |
1.118 |
0.053 |
-0.217 |
-0.14 |
-0.268 |
|
3 |
183.96 |
323.02 |
242.93 |
165.06 |
1.113 |
0.055 |
-0.222 |
-0.138 |
-0.269 |
|
4 |
213.96 |
330.24 |
251.63 |
165.76 |
1.022 |
0.116 |
-0.294 |
-0.095 |
-0.287 |
|
5 |
243.96 |
334.85 |
262.47 |
165.59 |
0.908 |
0.215 |
-0.344 |
-0.04 |
-0.3 |
|
6 |
273.96 |
336.5 |
273.85 |
163.7 |
0.791 |
0.33 |
-0.357 |
0.02 |
-0.302 |
|
7 |
303.96 |
334.45 |
283.2 |
160.31 |
0.703 |
0.433 |
-0.331 |
0.069 |
-0.295 |
|
8 |
328.79 |
328.79 |
286.43 |
158.66 |
0.675 |
0.482 |
-0.292 |
0.086 |
-0.29 |
|
9 |
333.96 |
327.02 |
286.26 |
158.75 |
0.676 |
0.486 |
-0.284 |
0.085 |
-0.29 |
|
10 |
3.96 |
312.77 |
277.72 |
162.52 |
0.753 |
0.453 |
-0.237 |
0.041 |
-0.3 |
|
11 |
33.96 |
297.65 |
260.15 |
165.74 |
0.932 |
0.342 |
-0.182 |
-0.052 |
-0.298 |
|
12 |
63.96 |
291.92 |
245.41 |
165.32 |
1.087 |
0.225 |
-0.121 |
-0.126 |
-0.275 |
|
13 |
93.96 |
295.52 |
237.62 |
164.36 |
1.167 |
0.133 |
-0.091 |
-0.162 |
-0.255 |
|
14 |
123.96 |
303.96 |
235.36 |
164 |
1.19 |
0.069 |
-0.103 |
-0.172 |
-0.249 |
2.3 Определение скоростей звеньев механизма.
2.3.1. Аналитическое определение скоростей звеньев механизма.
Аналитическое определение аналдогов скоростей основано на дифференцировании по общей координате (j1) уравнений (2.1), (2.3), (2.4), (2.5).
После дифференцирования уравнений системы (2.1) получаем:
-l1×j1¢×sin(j1) – l2×f2¢×sin(j2) + l3×f3¢×sin(j3) = 0
l1×j1¢×cos(j1) + l2×f2¢×cos(j2) - l3×f3¢×cos(j3) = 0 (2,6)
Где j1¢ – аналог угловой скорости звена 1 j1¢ = 1, т.к. ω направлена против хода часовой стрелки.
Решая систему относительно неизвестных получим:
j3¢ = (l1×j1¢×(cos(j1) – sin(j1)×ctg(j2))) / (l3×(cos(j3) – sin(j3)×ctg(j2)))
j2¢ = (l3×j3¢×sin(j3) – l1×j1¢×sin(j1)) / (l2×sin(j2))
В расчетном положении:
j3¢ = 0,333,j2¢ = 0,199 заносим эти значения в таблицу 2.4
Дифференцируем уравнение (2.3):
-l3×j3¢×sin(j3) + l4×j4¢×sin(j4)-l4¢×cos(j4)=0
l3×j3¢×cos(j3) - l4×j4¢cos(j4)-l4¢×sin(j4)=0
Откуда получим:
-l3×j3¢×sin(j3-j4) + l4×j4¢×sin(j4-j4)-l4¢×cos(j4-j4)=×= 0
l3×j3¢×cos(j3-j4) - l4×j4¢cos(j4-j4) -l4¢×sin(j4-j4) = 0 (2.7)
l4¢=-l3×j3¢×sin(j3-j4)
j4¢= l3×j3¢×cos(j3-j4)/l4
Врасчетном положении:
l4¢×= -0,201 j4 = 0,014
Дифференцируем систему (2.4):
S3x¢ = -0.5×l3×j3¢×sin(j3)
S3y = 0.5×l3×j3¢×cos(j3) (2.8)
Дифференцируем систему (2.5):
S2x¢ = -l1×j1¢×sin(j1) – 0,5×l2×j2¢×sin(j2)
S2y¢ = l1×j1¢×cos(j1) + 0,5×l2×j2¢×cos(j2) (2.9)
В расчетном положении:
S2x¢ = 0,157,S2y¢ =-0,123 S3x¢ = -0,095,S3y¢ =-0,032
заносим в таблицу 2.4
В остальных положениях скорости рассчитаны в MathCAD и результаты расчетов сведены в таблицу 2.5.
Результаты расчета скоростей в положении 1.
Таблица 2.4
|
Метод |
j2¢ |
j3¢ |
j4¢ |
l4¢ |
S2x¢ |
S2y¢ |
S3x¢ |
S3y¢ |
|
Аналитический |
0.199 |
0.333 |
0.014 |
-0.201 |
0,157 |
-0,123 |
0,095 |
-0,032 |
|
Графический |
0.2 |
0.332 |
0.014 |
0,201 |
0,156 |
-0,122 |
0,0945 |
-0,031 |
|
отклонение |
0.5 |
0.3 |
0 |
0 |
0,64 |
0,82 |
0,53 |
3,12 |
Погрешность в пределах инженерной. Расчеты считаем верными.
Результаты расчёта аналогов скоростей
Табл. 2.5.
|
пол |
f1° |
f2` |
f3` |
f4` |
l4` |
s2x` |
s2y` |
s3x` |
s3y` |
|
0 |
123.96 |
0.32 |
0 |
0 |
0 |
-0.091 |
-0.061 |
0 |
0 |
|
1 |
153.96 |
0.327 |
0.129 |
0.019 |
-0.074 |
-0.016 |
-0.12 |
0.033 |
-0.021 |
|
2 |
182 |
0.283 |
0.235 |
0.028 |
-0.139 |
0.067 |
-0.143 |
0.063 |
-0.033 |
|
3 |
183.96 |
0.278 |
0.242 |
0.028 |
-0.143 |
0.073 |
-0.143 |
0.065 |
-0.033 |
|
4 |
213.96 |
0.199 |
0.333 |
0.014 |
-0.201 |
0.157 |
-0.123 |
0.095 |
-0.032 |
|
5 |
243.96 |
0.107 |
0.381 |
-0.03 |
-0.229 |
0.213 |
-0.063 |
0.114 |
-0.015 |
|
6 |
273.96 |
-0.001 |
0.363 |
-0.096 |
-0.206 |
0.219 |
0.015 |
0.11 |
0.007 |
|
7 |
303.96 |
-0.145 |
0.237 |
-0.11 |
-0.12 |
0.161 |
0.078 |
0.07 |
0.016 |
|
8 |
328.79 |
-0.32 |
0 |
0 |
0 |
0.057 |
0.094 |
0 |
0 |
|
9 |
333.96 |
-0.362 |
-0.067 |
0.037 |
0.032 |
0.029 |
0.093 |
-0.02 |
-0.006 |
|
10 |
3.96 |
-0.556 |
-0.493 |
0.168 |
0.27 |
-0.156 |
0.09 |
-0.148 |
-0.02 |
|
11 |
33.96 |
-0.379 |
-0.594 |
0.029 |
0.358 |
-0.238 |
0.122 |
-0.177 |
0.031 |
|
12 |
63.96 |
-0.011 |
-0.372 |
-0.036 |
0.222 |
-0.201 |
0.095 |
-0.102 |
0.047 |
|
13 |
93.96 |
0.224 |
-0.158 |
-0.024 |
0.091 |
-0.15 |
0.018 |
-0.04 |
0.026 |
|
14 |
123.96 |
0.32 |
0 |
0 |
0 |
-0.091 |
-0.061 |
0 |
0 |
2.3.2. Графическое определение скоростей (построение планов скоростей).
Решение этой задачи графическим методом основано на построении плана скоростей для первого положения механизма план строим следующим образом.
Va = w1×l1 = 0.22×1 = 0.22м/с
mv = Va / pa = 0.22 / 64 = 0.0034375 (м/с)/мм
![]()
![]()
![]() Точка
В в движении звена 2 :
Точка
В в движении звена 2 :
Vb = Va + Vb/a
Про Vb/aизвестно, что оно перпендикулярно АВ
Из точки а, плана скоростей, откладываем направление Vb/a
![]()
![]() С
другой стороны точка b
участвует во вращательном движении звена 3 относительно точки О2.
С
другой стороны точка b
участвует во вращательном движении звена 3 относительно точки О2.
Vb = Vb/о2
Из полюса плана скоростей – р перпендикулярно О2В, до пересечения с направлением Vb/a строим направление Vb. Точка пересечения построенных направлений (т. b) определит отрезки ab= 40 мм аналог Vb/a = ab×mv = 1375 м/с, и pb=58.5мм – аналог Vb/c = pb×mv = 0,201 м/с.
Зная линейные скорости определим угловые:
w3 = Vb/c / l3 = 0.201 / 0,605 = 0.332 c-1
w2 = Vb/a / l2 = 0.1375 / 0.6875 = 0,2 c-1
Полученные значения заносим в табл. 2,4
Vd = Vb + Vd/b
Из точки b плана скоростей откладываем направление Vb/d перпендикулярно ВД.
С другой стороны ползун Д движется по направляющей. Из полюса р, параллельно траектории движения Д до пересечения с линией, определяющей направление Vd/b, строим направление Vd. Точка пересечения – точка d.
bd = 4.2мм – аналог Vd/b = bd×mv = 0,0144 м/с2
w4 = Vd/b / l4 = 0.0144 / 1,02 = 0,014 м/с
pd = 58.4мм – аналог Vd = pd×mv = 0,201 м/с
Заносим полученные данные в табл 2.4
По теореме подобия найдем координаты скоростей центров масс
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




 Величина
Величина