Федеральное агентство по образованию
Государственное
образовательное учреждение
высшего профессионального образования
“Сибирский государственный индустриальный университет”
Кафедра автоматизированного электропривода
и промышленной электроники
Отчет по лабораторной работе № 3
Исследование точности работы САУ и
их элементов в установившихся и переходных режимах
Вариант 4
Выполнил: студент гр.АЭП-082
Маршев Д,
Проверил: к.т.н, доцент
Богдановская Т.В.
Новокузнецк, 2011г.
Цель работы: изучение закономерностей, связывающих показатели качества работы элементов и систем с их структурой и параметрами.
1.Исследование статических и динамических
характеристик звеньев САУ.
1)Интегратор охваченный ОС.
Введем ПФ интегратора, а также три ПФ Wi1, Wi2 и Wi3 по выражению:
для трех значений kос=1; 0.2; 0.1.
>> ki=4; koc=1; 0.2; 0.1;
>> Wi=tf(ki,[1 0])
Transfer function:
4
-
s
>> Wi1=feedback(Wi,1 )
Transfer function:
4
-----
s + 4
>> Wi2=feedback(Wi,0.2 )
Transfer function:
4
-------
s + 0.8
>> Wi3=feedback(Wi,0.1 )
Transfer function:
4
-------
s + 0.4
Полученая передаточная функция интегратора:
Передаточные функции звеньев, полученных путём охвата данного интегрирующего звена отрицательной обратной связью (коэффициенты в обратной связи: kос= 1; 0.2; 0.1):
Постоянные
времени полученных звеньев: ![]()
![]()
![]()
Коэффициенты
передачи звеньев: ![]()
![]()
![]()
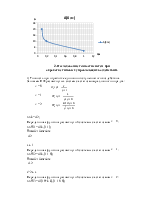
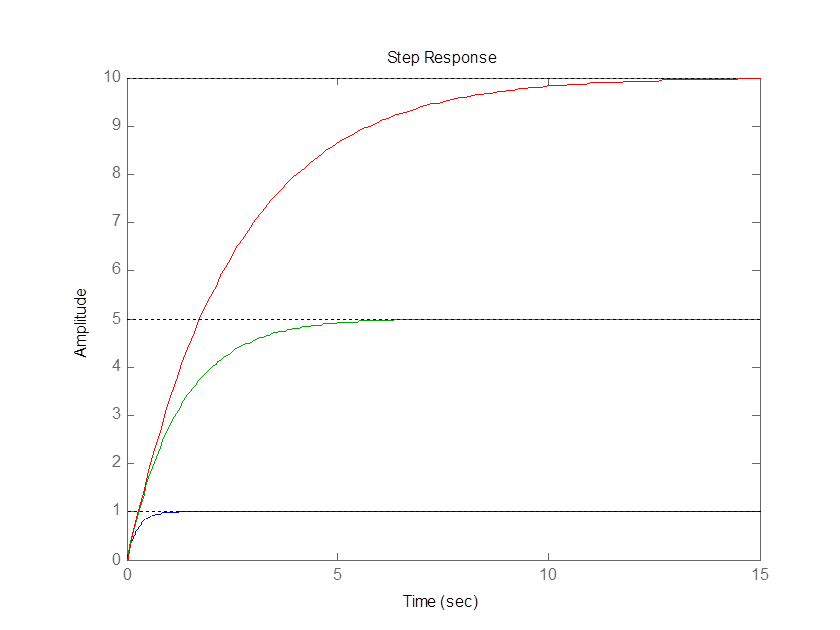
Построение переходных характеристик интегратора, охваченного обратной связью:
>> step(Wi1,Wi2,Wi3)
2) Инерционное интегрирующее звено с обратной связью.
Введем
ПФ  , где значения kии и Tии
заданы в табл. 3.1 согласно варианту. Запишем как и в предыдущем пункте три ПФ
по тому же выражению и для тех же значений kос.
, где значения kии и Tии
заданы в табл. 3.1 согласно варианту. Запишем как и в предыдущем пункте три ПФ
по тому же выражению и для тех же значений kос.
>> kii=5;Tii=4;
>> Wii=tf(kii,[Tii 1 0])
Transfer function:
5
---------
4 s^2 + s
>> Wii1=feedback(Wii,1)
Transfer function:
5
-------------
4 s^2 + s + 5
>> Wii2=feedback(Wii,0.2)
Transfer function:
5
-------------
4 s^2 + s + 1
>> Wii3=feedback(Wii,0.1)
Transfer function:
5
---------------
4 s^2 + s + 0.5
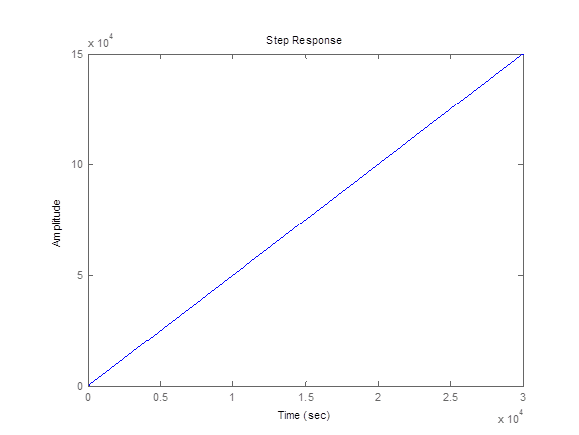
Построение переходных характеристик инерционных интегрирующих звеньев. Без ОС:
>> step(Wii)
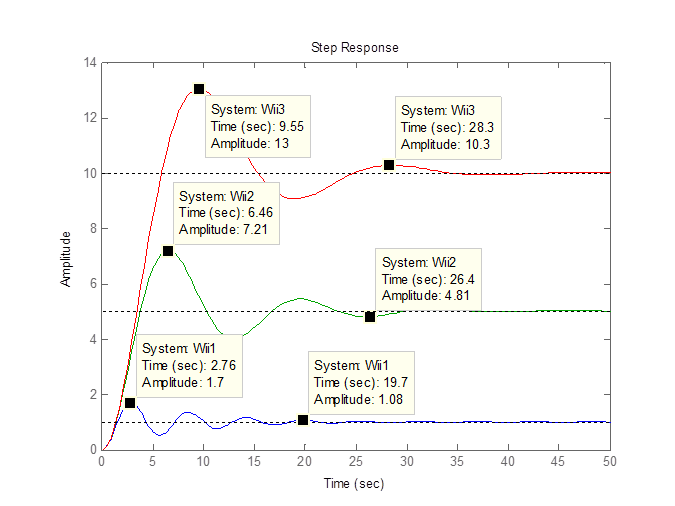
С введенной ОС:
>> step(Wii1,Wii2,Wii3)
Полученая передаточная функция инерционного интегрирующего звена:
Передаточные функции звеньев, полученных путём охвата данного инерционного интегрирующего звена отрицательной обратной связью (коэффициенты в обратной связи: kос= 1; 0.2; 0.1):



Коэффициенты
передачи звеньев: ![]()
![]()
![]()
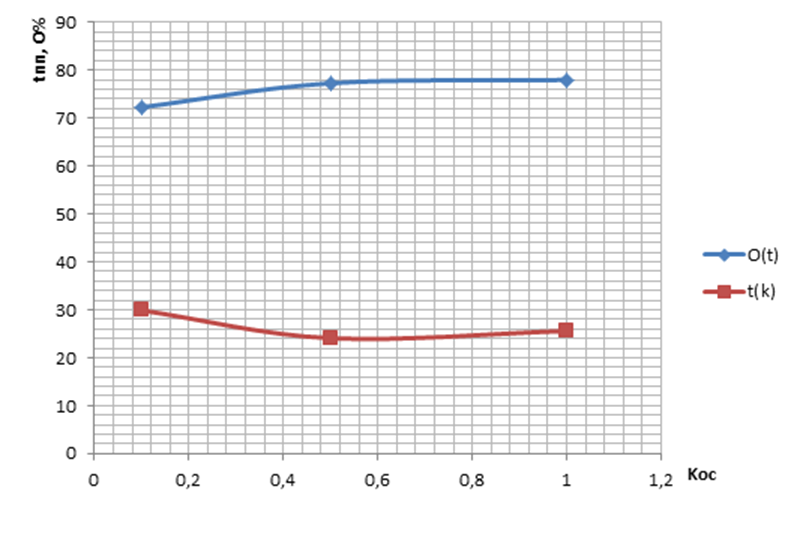
Перерегулирования:
![]()
![]()
![]()
Время
переходного процесса: ![]()
![]()
![]()
Построим
зависимости ![]()
![]()
3) Инерционное звено 2-го порядка с обратной связью.
Возьмем за исходную ПФ и создим дополнительные три ПФ для звена,
охваченного ОС с коэффициентом kос = 1;
0.5; 0.1.
>> Wiii=Wii1
Transfer function:
5
-------------
4 s^2 + s + 5
>> Wiii1=feedback(Wiii, 1)
Transfer function:
5
--------------
4 s^2 + s + 10
>> Wiii2=feedback(Wiii, 0.5)
Transfer function:
5
---------------
4 s^2 + s + 7.5
>> Wiii3=feedback(Wiii, 0.1)
Transfer function:
5
---------------
4 s^2 + s + 5.5
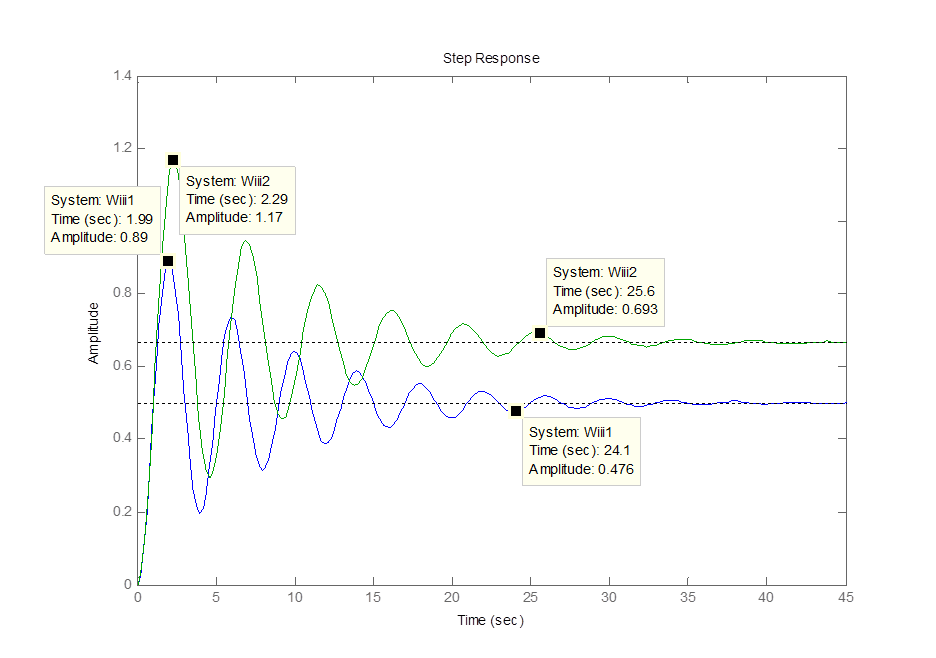
Построение переходных характеристик инерционного звена второго порядка, с и без обратной связью:
>>
step(Wiii,Wiii3)
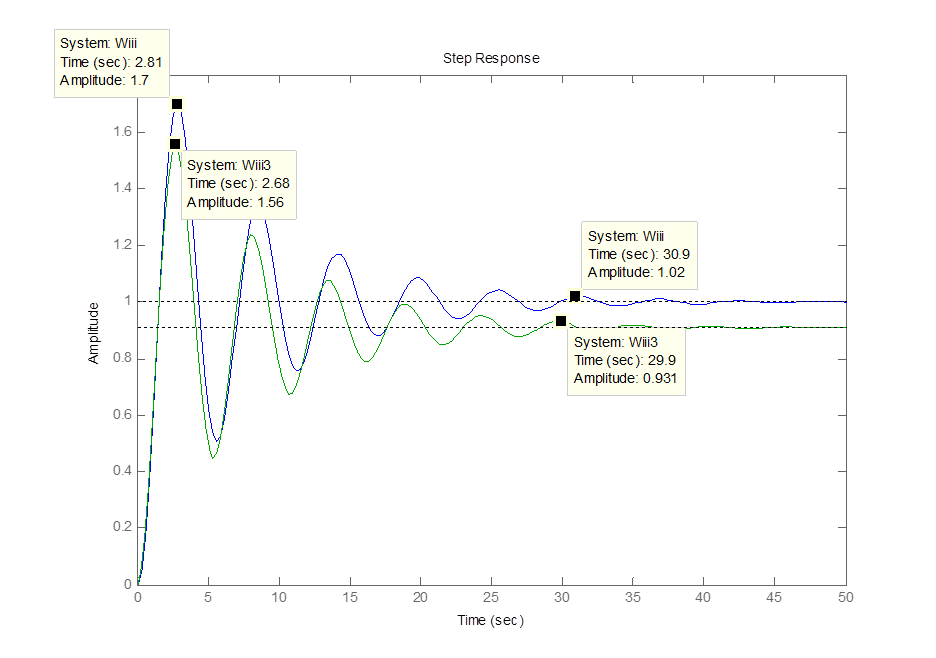
>> step(Wiii1,Wiii2)
Перерегулирования:
![]()
![]()
![]()
![]()
Время
переходного процесса: ![]()
![]()
![]()
![]()
Построим
зависимости ![]()
![]()
4) Двойной интегратор с обратной связью.
Запишем ПФ двойного
интегрирующего звена  и создадим еще три звена,
охваченных ОС с коэффициентами kос = 1;
0.2; 0.1.
и создадим еще три звена,
охваченных ОС с коэффициентами kос = 1;
0.2; 0.1.
>> k2u=11;
Transfer function:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.