11
---
s^2
>> W2i1=feedback(W2i, 1)
Transfer function:
11
--------
s^2 + 11
>> W2i2=feedback(W2i, 0.2)
Transfer function:
11
---------
s^2 + 2.2
>> W2i3=feedback(W2i, 0.1)
Transfer function:
11
---------
s^2 + 1.1
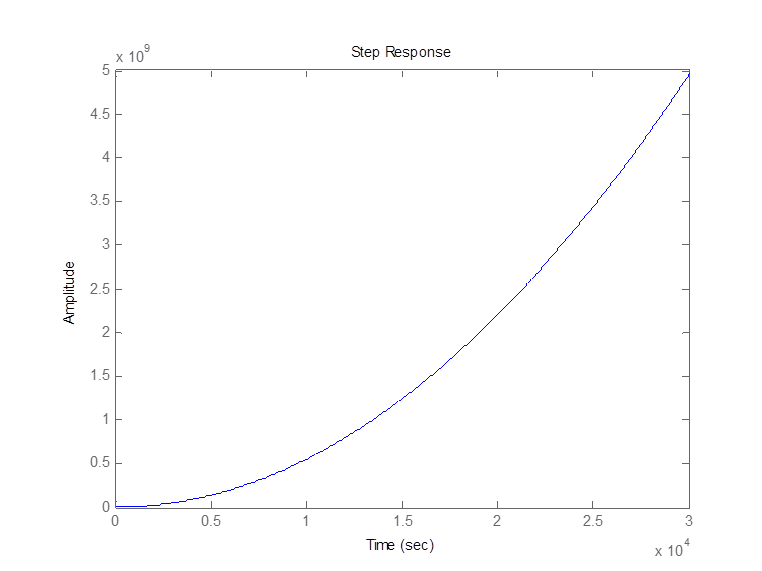
Построение переходных характеристик двойного интегратора
Без ОС:
>> step(W2i)
С введенной ОС:
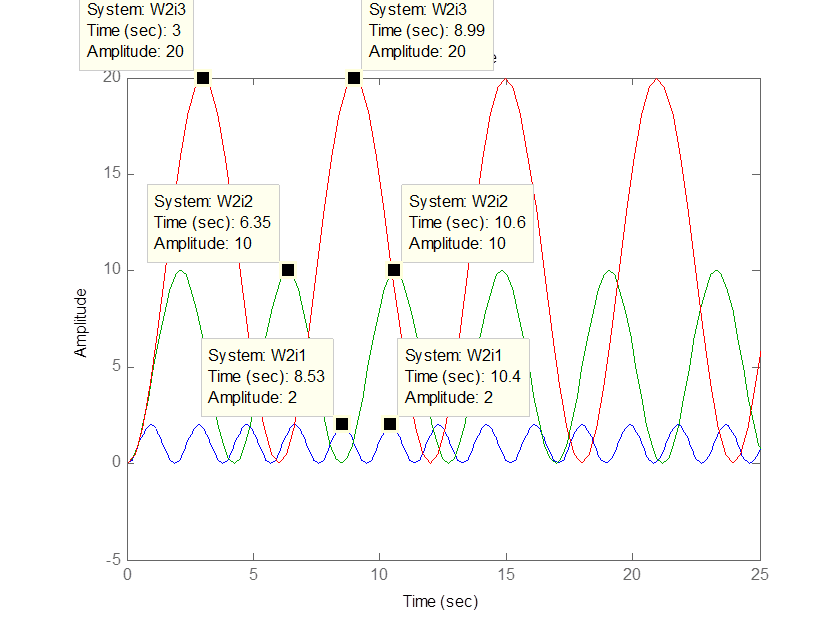
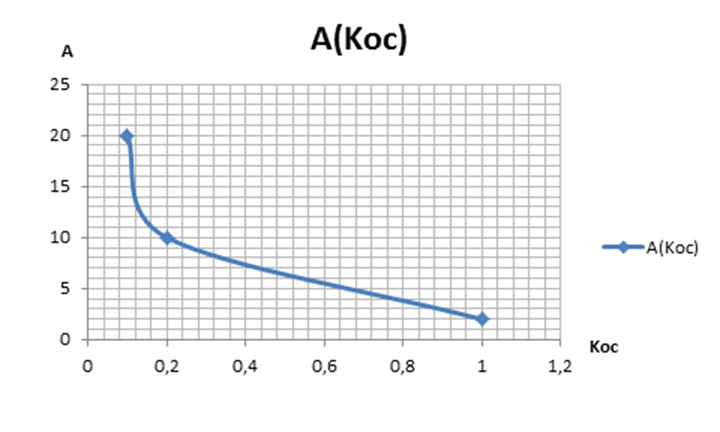
Амплитуды:
![]()
![]()
![]()
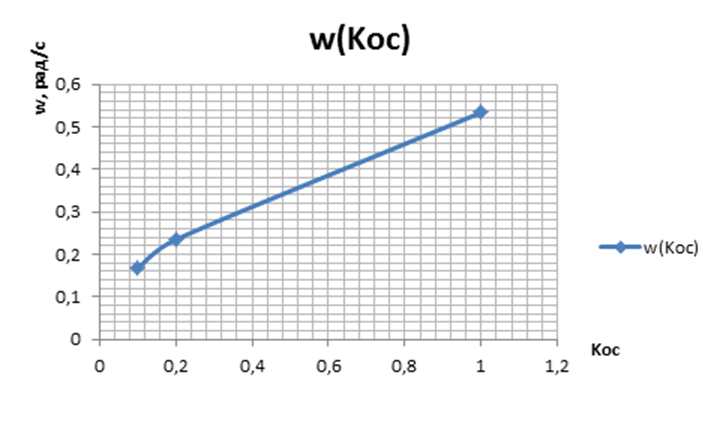
Частоты:
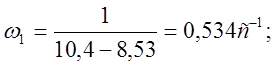
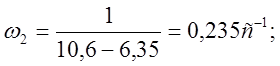
Построим
зависимости ![]()
![]()
2. Исследование точности систем при
обработке типовых управляющих воздействий.
1) Точность при отработке единичного ступенчатого воздействия.
Запишем ПФ разомкнутых систем с астатизмом различного порядка:
n = 0 
n = 1 
n = 2 
>> k=4.2;
Передаточная
функция разомкнутой системы с астатизмом ![]() :
:
>> W1=tf(k,[1 1])
Transfer function:
4.2
-----
s + 1
Передаточная
функция разомкнутой системы с астатизмом ![]() :
:
>> W2=tf(k,[1 1 0])
Transfer function:
4.2
-------
s^2 + s
Передаточная
функция разомкнутой системы с астатизмом ![]() :
:
>> W3=tf([10*k k],[1 1 0 0])
Transfer function:
42 s + 4.2
----------
s^3 + s^2
Получим ПФ замкнутых систем:
>> Wz1=feedback(W1,1)
Transfer function:
4.2
-------
s + 5.2
>> Wz2=feedback(W2,1)
Transfer function:
4.2
-------------
s^2 + s + 4.2
>> Wz3=feedback(W3,1)
Transfer function:
42 s + 4.2
----------------------
s^3 + s^2 + 42 s + 4.2
Получение на одном графике ПХ замкнутых систем для трёх ПФ:
>> step(Wz1,Wz2,Wz3)
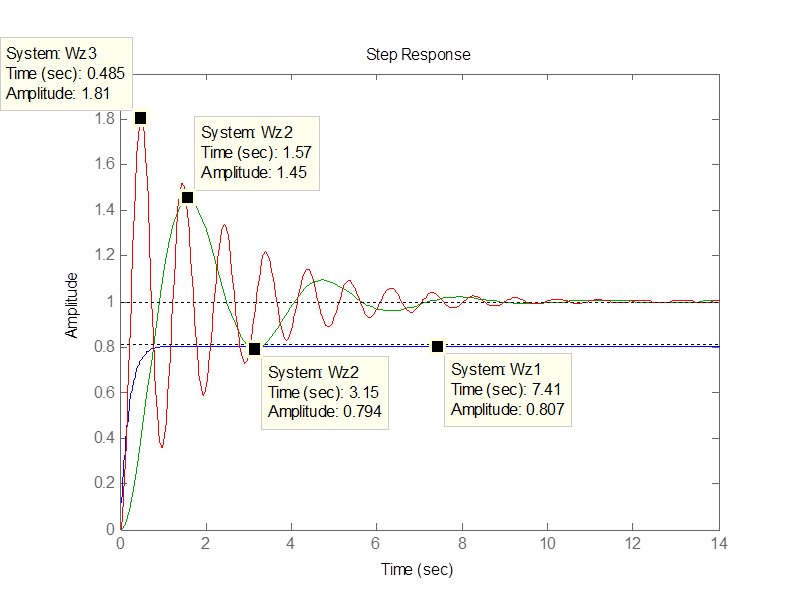
В
установившемся состоянии для звеньев с астатизмом первого и второго порядка
статическая ошибка равна нулю. Для звена с астатизмом нулевого порядка
статическая ошибка составляет: ![]()
Для
звена с астатизмом нулевого порядка, замкнутого отрицательной обратной связью
характерен апериодический переходный процесс; для звена астатизмом первого
порядка колебательный переходный процесс с коэффициентом демпфирования ![]() ; для звена астатизмом второго порядка так
же колебательный переходный процесс.
; для звена астатизмом второго порядка так
же колебательный переходный процесс.
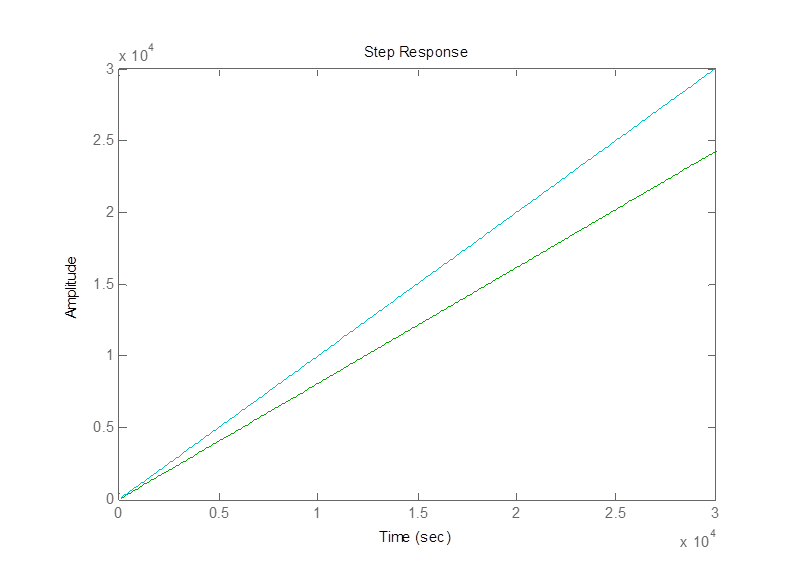
2) Точность при отработке единичного скачка скорости.
Умножим
каждую из передаточных функций ![]() на 1/р:
на 1/р:
>> w=tf(1,[1 0])
Transfer function:
1
-
s
>> w1=Wz1*w
Transfer function:
4.2
-----------
s^2 + 5.2 s
>> w2=Wz2*w
Transfer function:
4.2
-----------------
s^3 + s^2 + 4.2 s
>> w3=Wz3*w
Transfer function:
42 s + 4.2
--------------------------
s^4 + s^3 + 42 s^2 + 4.2 s
Для данных звеньев построим передаточные характеристики:
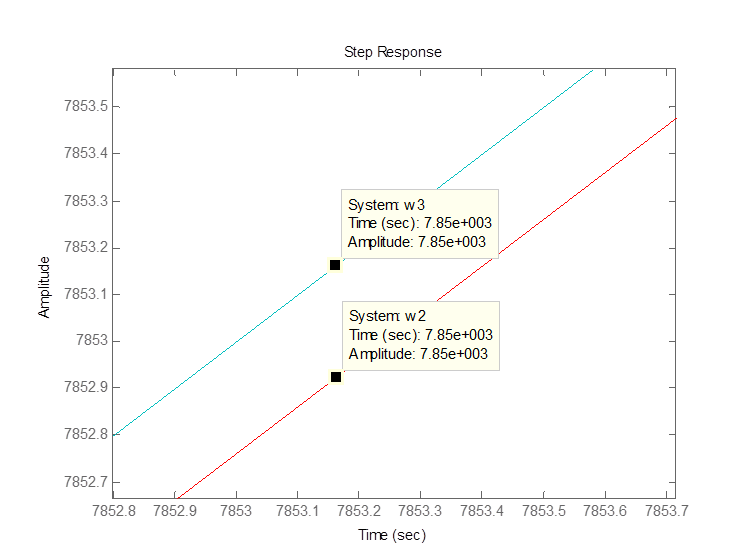
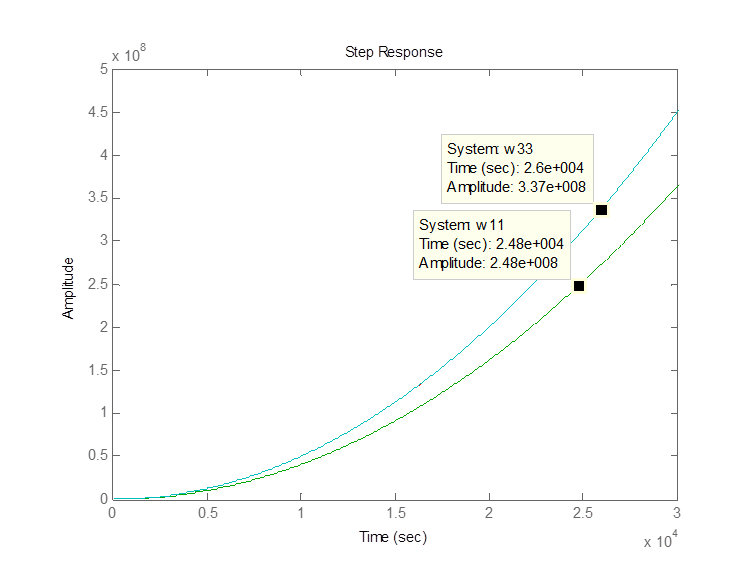
3) Точность при отработке единичного скачка ускорения.
Преобразуем все 4-е ПФ: W, W1, W2, W3 умножением каждой на 1/p.
>> w11=w1*w
Transfer function:
4.2
-------------
s^3 + 5.2 s^2
>> w22=w2*w
Transfer function:
4.2
-------------------
s^4 + s^3 + 4.2 s^2
>> w33=w3*w
Transfer function:
42 s + 4.2
----------------------------
s^5 + s^4 + 42 s^3 + 4.2 s^2
>> w44=w*w
Transfer function:
1
---
s^2
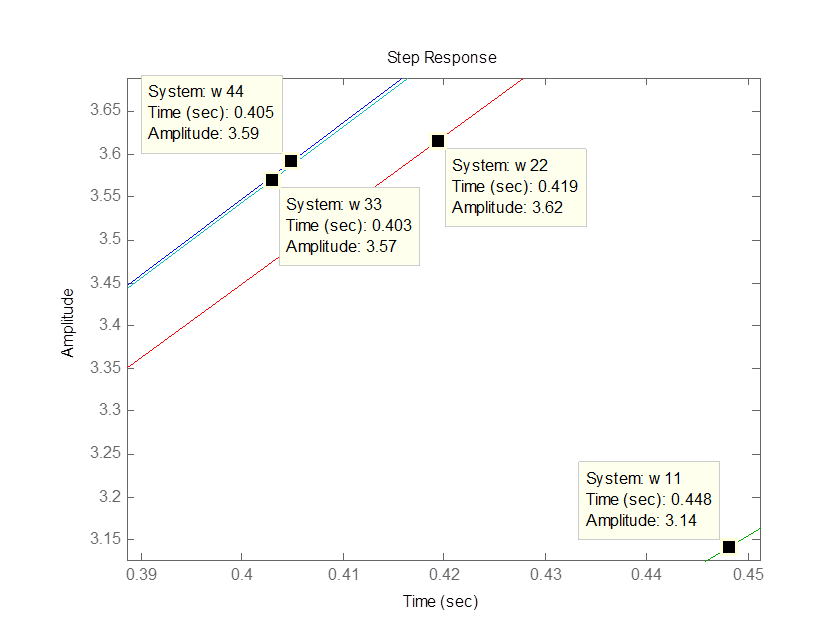
>> step(w44,w11,w22,w33)
3.Исследование точности систем
при отработке типовых возмущающих воздействий
Определим ПФ замкнутых систем по возмущающему воздействию и ввести их в ПК.
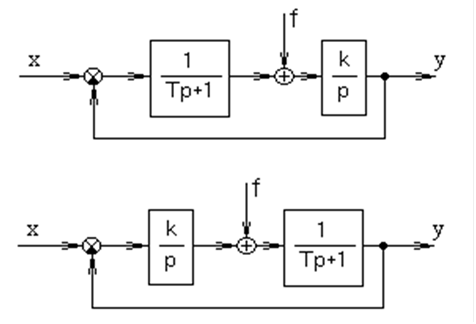 |
a)
б)
э=
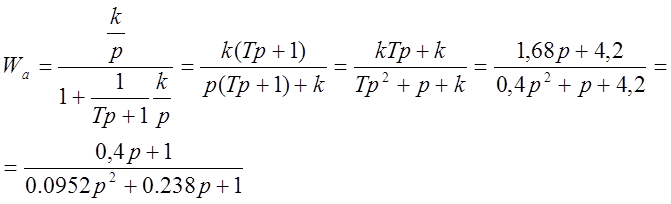
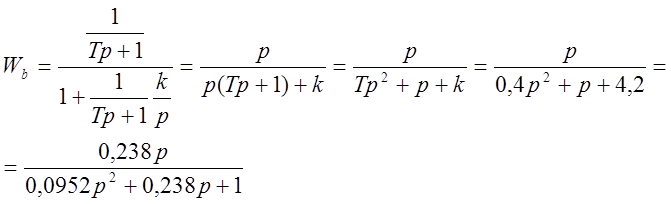
Постоянные времени: Та1 = 0,0952; Та2 = 0,238.
>> Wa=tf([0.4 1],[0.0952 0.238 1])
Transfer function:
0.4 s + 1
------------------------
0.0952 s^2 + 0.238 s + 1
>> Wb=tf([0.238 0],[0.0952 0.238 1])
Transfer function:
0.238 s
------------------------
0.0952 s^2 + 0.238 s + 1
>> step(Wa,Wb)
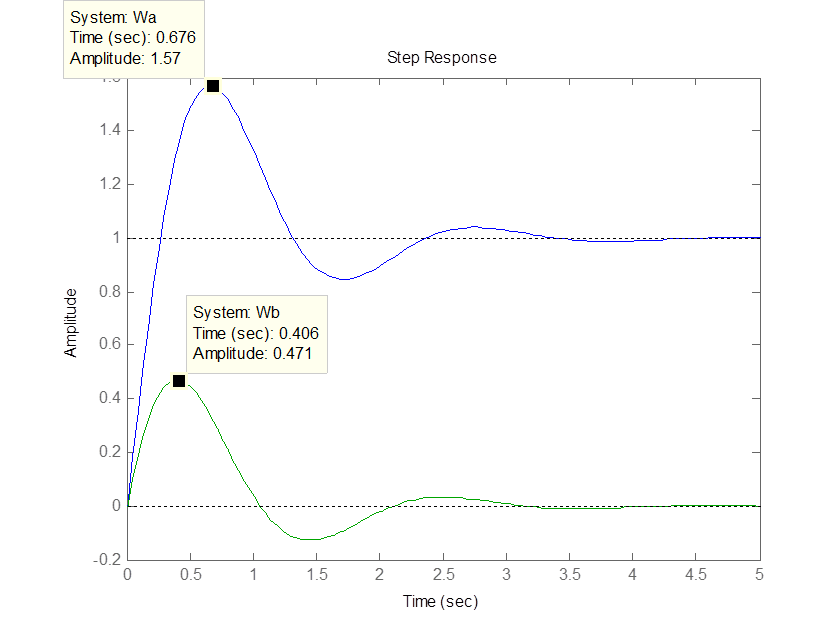
Для системы (а) в установившемся режиме после подачи возмущающего воздействия устанавливается статическая ошибка, величина которой равна 1 (данная система имеет астатизм нулевого порядка). Система (б) после подачи возмущающего воздействия возвращается в своё первоначальное состояние (данная система имеет астатизм первого порядка, так как содержит звено интегрирования в канале обратной связи относительно возмущающего воздействия).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.