хр(t) = Кр(1+ t /Tи)
В момент времени t = Tи
хр(t) = 2Kp
Увеличение Кр при рассогласовании приводит к увеличению глубины обратной связи в САР, поэтому исчезает статическая ошибка.
ПИ-регулятор поддерживает установившееся значение регулируемой величины. При отклонении текущего значения от заданного регулятор в начальный момент времени переместит рабочий орган на величину, пропорциональную величине отклонения. Но если при этом Хоб не придет к заданному значению, ПИ-регулятор будет продолжать перемещать рабочий орган.
При малом значении Кр ПИ-регулятор может работать с объектами, имеющими значительное запаздывание.
Условие устойчивости системы регулирования является необходимым, но недостаточным для получения желаемого процесса регулирования. Необходимое качество регулирования можно получить, подбирая соответствующую комбинацию закона регулирования и величины возмущающего воздействия.
Задача настройки заключается в том, чтобы в заданной системе регулирования выбрать и установить параметры регулятора, обеспечивающие близкий к оптимальному процесс регулирования.
5.3 Определение настроечных параметров регулятора
табличным методом
Исходными данными для расчета является экспериментальная характеристика объекта регулирования и тип регулятора.
1. На временной характеристике определяем точку перегиба, через которую проводим касательную линию и определяем Т и τ.
Первый метод аппроксимации самый точный т.к. максимальная ошибка данного метода составила: D =2,09.
 ;
;
2. Определяем отношение τ / Т:
τ / Т = 0,7/3,5 = 0,2
3. Для ПИ-регулятора и полученного отношения τ/Т определяем параметры настройки регулятора:
τ / Т = 0 ÷ 0,2
σ = 1,1 * Коб * τ / T = 1,1 * 110 * 0,7 / 3,5 = 24,2;
Ти = 3,3 * τ = 3,3 * 0,7 = 2,31;
 ;
;
δ = 1 / Кр;
Кр = 1 / δ = С1;
С1 = Кр=1 /24,2 = 0,0413;
С0 = Кр / Ти =0,0413/2,31=0,0179;
Wпи(p) = – (0,0179 + 0,0413p) / p
4. С помощью программы «ASOTAR» строим переходной процесс.
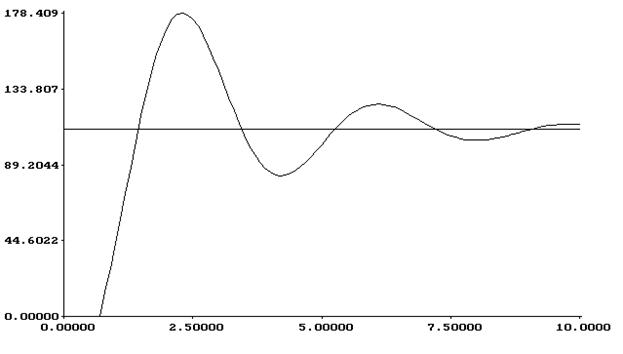
5.4 Определение настроечных параметров регулятора
методом расширенных АФЧХ
Этот метод базируется на:
1) использовании в качестве критерия, определяющего качество переходного процесса регулирования, степени затухания ψ;
2) определении расширенных амплитудно-фазовых характеристик объекта и регулятора;
3) применении основного условия устойчивости системы.
Степень затухания (ψ) – есть величина, характеризующая затухание переходного процесса регулирования, равная отношению разности двух соседних амплитуд колебания (направленных в одну сторону) к первой из них.
где h1 и h2 – соответственно амплитуды первого и второго полупериода наиболее слабозатухающей составляющей.
Однако непосредственно в расчетах используется другой показатель качества функционально связанный со степенью затухания ψ. Таким показателем является степень колебательности – m.
Степень колебательности (m) – также характеризует затухание колебательных составляющих процесса регулирования и численно определяется как отношение абсолютного значения действительной части к коэффициенту при мнимой части корня характеристического уравнения с наименьшим абсолютным значением этого отношения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.