Простейшие движения твердого тела
§ 2.7.Степени свободы. Теорема о проекциях
Числом степеней свободы твердого тела называют число независимых параметров, определяющих положение тела относительно рассматриваемой системы координат.
Свободная точка имеет три степени свободы, свободное твердое тело в общем случае имеет шесть степеней свободы. Твердое тело (его положение) может быть задано тремя точками, не лежащими на одной прямой. Расстояния между точками в твердом теле должны оставаться неизменными при любых его движениях. Это накладывает на координаты фиксированных точек три условия. Получаем (3n-k=s)=(9-3=6) шесть степеней свободы.
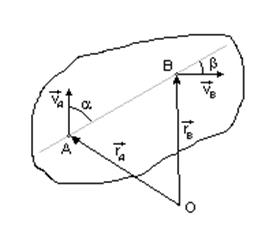
Теорема. При любом движении твердого тела проекции скоростей двух его точек на прямую, соединяющую эти точки, равны.
|
|
Возведем обе части в скалярный квадрат:
Продифференцируем по времени:
|
Раскладывая скалярные произведения векторов и сокращая на l, имеем: vACosa=vBCosb
§ 2.8. Поступательное движение твердого тела
Поступательным движением твердого тела называется такое его движение, при котором любая прямая, жестко связанная с телом, остается параллельной самой себе в каждый момент времени.
Очевидно, достаточно, чтобы это выполнялось только для двух непараллельных прямых, связанных с телом.
Траектории точек у поступательно движущегося твердого тела могут быть не только прямыми, но и любыми кривыми, в том числе окружностями.
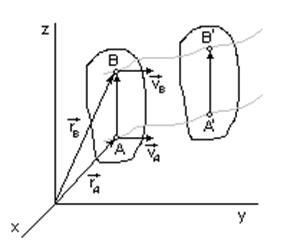
Теорема. При поступательном движении твердого тела траектории, скорости и ускорения всех точек тела одинаковы.
|
|
Вектор АВ является всегда постоянным по модулю, а при поступательном движении не изменяется и по направлению. При сдвиге на АВ траектории точек совпадут.
|
Движение твердого тела, для которого векторы скоростей точек равны только в один момент времени, а не все время, называется мгновенным поступательным движением.
Для мгновенного поступательного движения ускорения точек в общем случае не являются одинаковыми.
Твердое тело, движущееся поступательно, имеет три степенм свободы, так как для описания его движения достаточно задать функции x=f1(t), y=f2(t), z=f3(t) для любой точки и использовать кинематику одной точки.
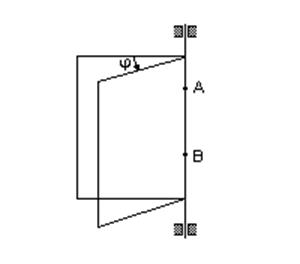
§ 2.9. Вращение твердого тела вокруг неподвижной оси
Вращением твердого тела вокруг неподвижной оси называется такое его движение, при котором две точки тела (или его продолжения) остаются неподвижными в течение всего времени движения.
Прямая, соединяющая эти точки, называется осью вращения.
|
|
Положение тела относительно выбранной системы
отсчета полностью и однозначно определяется в любой момент времени, если
задано уравнение Угловая скорость Угловое ускорение |
Вращение называется равномерным, если w=const

Вращение называется равнопеременным, если e=const

и
после второго интегрирования 
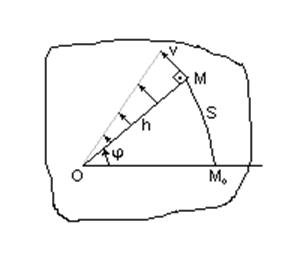
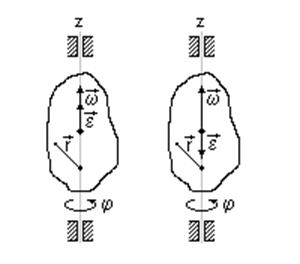
§ 2.10. Скорости и ускорения точек тела при вращении
|
|
j = f(t), s = hj
Скорости точек тела при вращении вокруг неподвижной оси пропорциональны их расстояниям до этой оси и перпендикулярны радиусам вращения. |
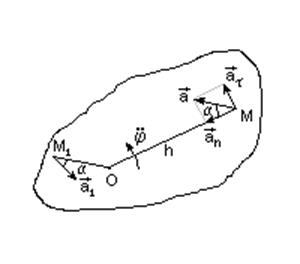
Ускорение точки разлагаем на касательную и нормальные составляющие
|
|
т.к. для окружности r=h Окончательно |
Касательные, нормальные и полные ускорения точек, как и скорости, распределены тоже по линейному закону.
Обозначив a угол между полным ускорением точки и ее радиусом вращения, имеем:
так как нормальное ускорение an всегда положительно.
Угол a для всех точек тела один и тот же. Откладывать его следует от ускорения к радиусу вращения в направлении дуговой стрелки углового ускорения независимо от направления вращения твердого тела.
|
|
Диск 1 вращается вокруг неподвижной оси О1 по закону j=(t-t2) и приводит во вращение диск 2. Определить угловые скорости дисков, а также скорости и ускорения точек их соприкосновения А в момент времени t=5c, если r1 =0.2 м, r2 = 0.3 м. Имеем При t=5c Скорости и касательные ускорения точек соприкосновения дисков 1 и 2 при отсутствии скольжения между ними одинаковы
|
Кроме того, 




Векторы угловой скорости и ускорения
|
|
Из параграфа о сложном движении точки считая
и можем получить все предыдущие результаты для вращения тела вокруг неподвижной оси. |
§ 2.11. Плоское движение твердого тела
Плоским движением твердого тела называют такое его движение, при котором каждая его точка все время движется в одной и той же неподвижной плоскости. Часто это движение называют плоскопараллельным, так как плоскости, в которых движутся отдельные точки, параллельны между собой.
Траектории точек тела при плоском движении являются плоскими кривыми.
Такой случай движения часто реализуется в технике при движении механизмов и машин.
Вращательное движение твердого тела вокруг неподвижной оси является частным случаем плоского движения.
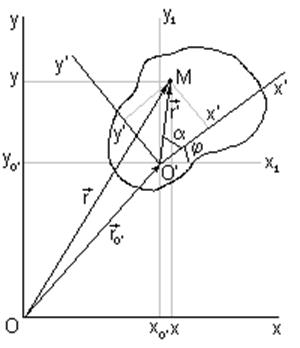
Для изучения плоского движения твердого тела достаточно рассмотреть движение плоской фигуры в ее плоскости, параллельной неподвижной плоскости P0.
Для задания положения плоской фигуры на плоскости относительно координат Oxy достаточно задать на этой плоскости положение отрезка О'M, скрепленного с фигурой.
|
|
Скрепим с твердым телом подвижную систему осей O’x’y’Тогда для координат (x,y) точки М будем иметь:
где Уравнения движения твердого тела в плоском движении будут иметь вид: xo’ =f1(t); yo’ =f2(t); j = f3(t), то есть имеем три степени свободы. |
Раскрывая Cos и Sin суммы и учитывая, что r’Cosa=x’, r’Sina=y’ получаем:
или в векторно-матричной форме
![]() , где
, где
 - матрица поворота на
плоскости.
- матрица поворота на
плоскости.
Эти формулы позволяют определить координаты любой точки плоской фигуры по заданным уравнениям движения этой фигуры и координаты ее точки относительно подвижной системы координат, скрепленной с фигурой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





 ,
,