Рис. 5.
· 3 кнопки ф. Lovato, выступающие, диапазон рабочих температур от -25 до +60ºС, степень защиты IP56.
8 LM2T B202, черная – «Сеть»,
8 LM2T B203, зеленая – «Пуск»,
8 LM2T B203, красная – «Стоп».
· 3 лампочки ф. Lovato, напряжение питания: 24VAC/DC, 110VAC, 230VAC; винтовое крепление, диапазон рабочих температур: от -5 до +40ºС; степень защиты IP20.
8 LP2T ILB8, белая – «Сеть»,
8 LP2T ILB3, зеленая – «Работа»,
8 LP2T ILB4, красная – «Авария».
В качестве программируемого логического контроллера выбран CPU 314ST производства ф. VIPA со следующими характеристиками (рис. 6):
· байтовая операция: 15 нс;
· битовая операция: 15 нс;
· встроенные AI/AO/Pt 100: 2/4/1;
· встроенные DI/DO/DIO: 8/-/8;
· интерфейсы: MPI, RS-485 (Profibus DP), Ethernet;
· шина расширения: SPEED-Bus (USB);
· рабочая память: 512 КБ (50% программа/50% данные);
· расширение памяти: до 2 МБ.

Рис.6
Для связи рабочей станции и ПЛК используется интерфейс Ethernet.
Для связи пульта станка и ПЛК используются дискретные сигналы; 3 DI контроллера для кнопок «Сеть», «Пуск», «Стоп» и 3 DO контроллера для включения лампочек «Сеть», «Работа», «Авария».
Для обеспечения заданной в задании точности позиционирования механизма δ точность датчиков должна быть не менее, чем в 4-5 раз выше в самом неблагоприятном месте рабочей зоны механизма. Поэтому цена деления кругового датчика d должна составить:
d ≤ δ / (k ·Rmax) = 1 / (4 ·1000) = 0,00025, где
δ = 1 мм – погрешность позиционирования, Rmax = 1000мм – максимальный радиус зоны обслуживания, k = 4…5 – коэффициент.
Рассчитаем, какой разрешающей способностью (количество дискрет на оборот) должен обладать датчик, чтобы обеспечить такую цену деления:
РС = (2 ∙ π) / 0.00025 = 25 132 (дискрет/оборот).
В качестве датчиков углов поворота осей механизма α, β, φ, θ и γ выбран инкрементный преобразователь угловых перемещений (энкодер) ЛИР-112А (рис. 7), в количестве 5-ти штук, равном количеству угловых степеней подвижности.

Рис. 7.
Технические характеристики:
· разрешающая способность: 32 000 дискрет/оборот;
· напряжение питания: +5В;
· тип выходного сигнала: ПИ (TTL).
Для фиксирования линейного перемещения выбрана магнитная система измерения линейных перемещений Küebler серии LIMES LI20 (рис. 8).

Рис. 8.
Принцип работы заключается в определении местоположения магнитного датчика относительно нулевой отметки магнитной линейки путем определения направления и величины (напряженности) магнитного поля (см. рис. 9).
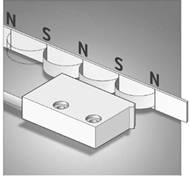
Рис. 9
Технические характеристики:
· простота конструкции и легкость монтажа: магнитную линейку можно просто приклеить на рельс, станину, руку робота;
· высокая точность измерений: погрешность составляет 0,025 мм (заданная погрешность позиционирования 1 мм);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.