Литература.
1. В.А. Бесекерский, Е.П. Попов, Теория систем автоматического регулирования, 1972.
2. Основы автоматического управления, Под редакцией В.С. Пугачёва, 1968.
3. Я.Н. Ройтенберг, Автоматическое управление, 1971.
4. Математические основы теории автоматического регулирования, Под редакцией Б.К. Чемоданова, М., 1971.
5. Е.П. Попов, Теория нелинейных систем автоматического регулирования и управления, М., 1979.
e. В.П. Черепанов, ИЯФ, Microsoft Network\\L6-0_229\Cherepanov\User\CAP_2003\.
Общие сведения об автоматических системах [1].
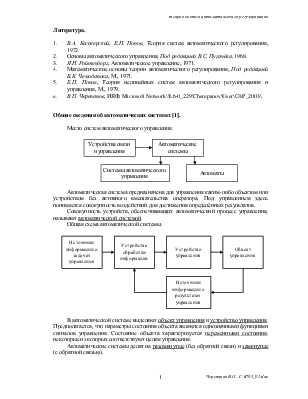
Место систем автоматического управления.
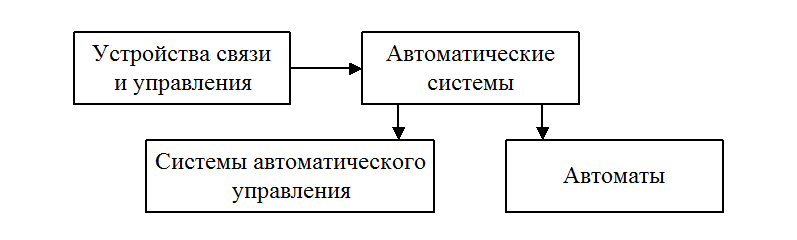
Автоматическая система предназначена для управления каким-либо объектом или устройством без активного вмешательства оператора. Под управлением здесь понимается совокупность воздействий для достижения определённых результатов.
Совокупность устройств, обеспечивающих автоматический процесс управления, называют автоматической системой.
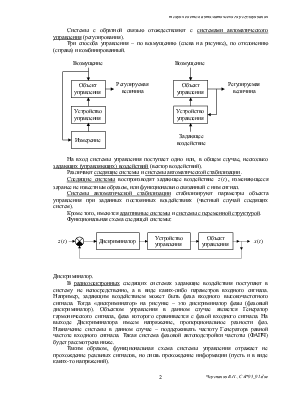
Общая схема автоматической системы.
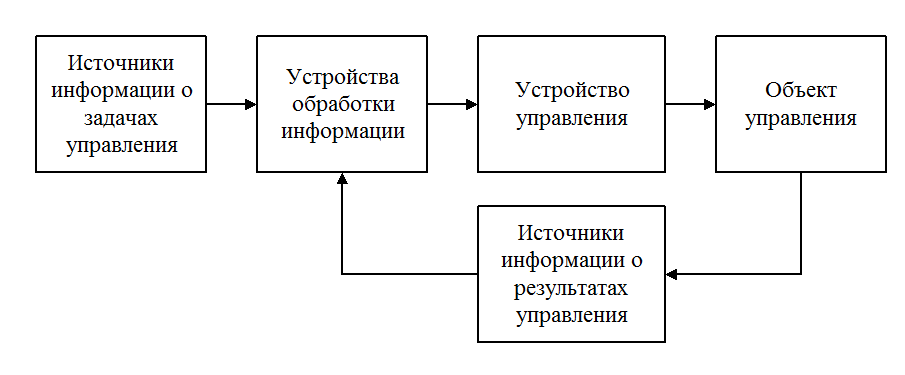 В автоматической системе выделяют объект
управления и устройство управления. Предполагается, что параметры
состояния объекта являются однозначными функциями сигналов управления.
Состояние объекта характеризуется переменными состояния, некоторые из
которых соответствуют целям управления.
В автоматической системе выделяют объект
управления и устройство управления. Предполагается, что параметры
состояния объекта являются однозначными функциями сигналов управления.
Состояние объекта характеризуется переменными состояния, некоторые из
которых соответствуют целям управления.
Автоматические системы делят на разомкнутые (без обратной связи) и замкнутые (с обратной связью).
Системы с обратной связью отождествляют с системами автоматического управления (регулирования).
Три способа управления – по возмущению (слева на рисунке), по отклонению (справа) и комбинированный.
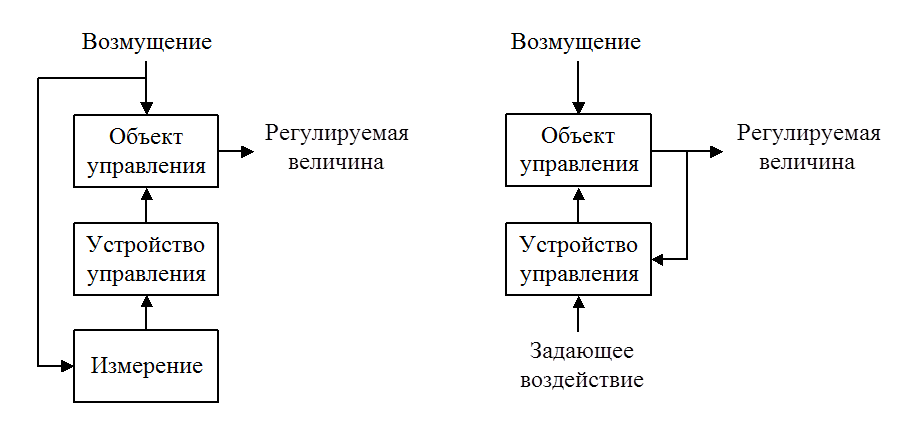
На вход системы управления поступает одно или, в общем случае, несколько задающих (управляющих) воздействий (вектор воздействий).
Различают следящие системы и системы автоматической стабилизации.
Следящие системы
воспроизводят задающее воздействие ![]() , изменяющееся заранее
не известным образом, или функционально связанный с ним сигнал.
, изменяющееся заранее
не известным образом, или функционально связанный с ним сигнал.
Системы автоматической стабилизации стабилизируют параметры объекта управления при заданных постоянных воздействиях (частный случай следящих систем).
Кроме того, имеются адаптивные системы и системы с переменной структурой.
Функциональная схема следящей системы:
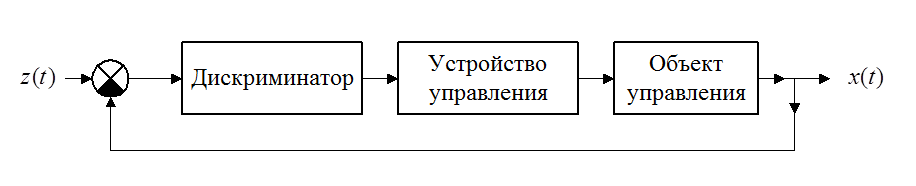
Дискриминатор.
В радиоэлектронных следящих системах задающие воздействия поступают в систему не непосредственно, а в виде каких-либо параметров входного сигнала. Например, задающим воздействием может быть фаза входного высокочастотного сигнала. Тогда «дискриминатор» на рисунке – это дискриминатор фазы (фазовый дискриминатор). Объектом управления в данном случае является Генератор гармонического сигнала, фаза которого сравнивается с фазой входного сигнала. На выходе Дискриминатора имеем напряжение, пропорциональное разности фаз. Назначение системы в данном случае – поддерживать частоту Генератора равной частоте входного сигнала. Такая система фазовой автоподстройки частоты (ФАПЧ) будет рассмотрена ниже.
Таким образом, функциональная схема системы управления отражает не прохождение реальных сигналов, но лишь прохождение информации (пусть и в виде каких-то напряжений).
Классификация систем по характеру внутренних динамических процессов [1].
Каждая автоматическая система состоит из ряда звеньев, различным образом соединённых между собой. Каждое отдельно взятое звено имеет вход и выход (в общем случае – несколько входов и выходов).
Система непрерывного действия – в каждом из звеньев системы непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины.
Система дискретного действия – хотя бы в одном звене непрерывный входной сигнал преобразуется в последовательность импульсов. Квантование может производиться по уровню или по времени. Сюда же относятся системы с цифровыми вычислительными устройствами.
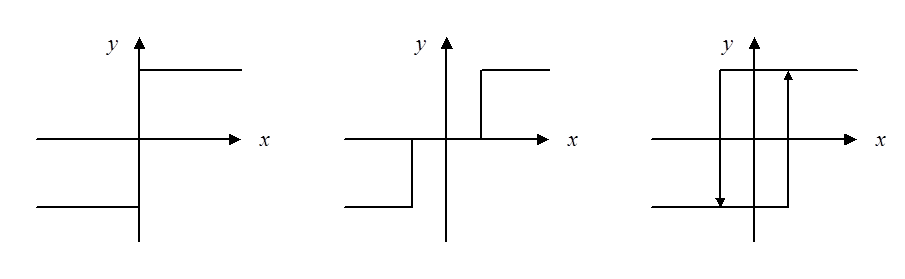
 Система релейного действия – хотя
бы в одном звене при непрерывном изменении входной величины выходная величина в
некоторых точках процесса изменяется скачком.
Система релейного действия – хотя
бы в одном звене при непрерывном изменении входной величины выходная величина в
некоторых точках процесса изменяется скачком.
 Линейная система – динамика всех
звеньев описывается линейными уравнениями. Если это обыкновенные
дифференциальные уравнения (с постоянными параметрами), то это обыкновенная
линейная система. В противном случае это линейная система с переменными
параметрами. Если это обыкновенные дифференциальные уравнения в частных
производных, то это линейная система с распределёнными параметрами.
Линейная система – динамика всех
звеньев описывается линейными уравнениями. Если это обыкновенные
дифференциальные уравнения (с постоянными параметрами), то это обыкновенная
линейная система. В противном случае это линейная система с переменными
параметрами. Если это обыкновенные дифференциальные уравнения в частных
производных, то это линейная система с распределёнными параметрами.
Нелинейная система – хотя бы одно звено имеет нелинейную статическую характеристику, либо имеется любая нелинейная связь переменных и их производных. Сюда же относятся системы релейного действия.
Программы регулирования[1].
Задача системы автоматического регулирования – поддержание требуемого значения регулируемой величины или изменение её по определённой программе.
Временная и параметрическая программы управления:
![]() ,
, ![]() .
.
Здесь ![]() –
физические величины, характеризующие текущее состояние объекта в процессе
управления.
–
физические величины, характеризующие текущее состояние объекта в процессе
управления.
Типичный пример параметрической программы управления является закон наведения в системах телеуправления и самонаведения снарядов.
Пусть тело А
должно быть сближено с телом Б для мягкого контакта. ![]() – текущее расстояние между ними. Условия
сближения:
– текущее расстояние между ними. Условия
сближения: ![]() ,
, ![]() при
при ![]() , ускорение
, ускорение ![]() ограничено,
время сближения Т ограничено. Датчики измеряют расстояние и скорость.
Представим закон наведения в виде
ограничено,
время сближения Т ограничено. Датчики измеряют расстояние и скорость.
Представим закон наведения в виде ![]() . Пусть некое
устройство формирует сигнал
. Пусть некое
устройство формирует сигнал ![]() , величина которого
должна быть сведена к нулю. Найдём целесообразное выражение для
, величина которого
должна быть сведена к нулю. Найдём целесообразное выражение для ![]() .
.
Линейный закон
наведения: ![]() . При этом
. При этом  .
.
Пусть ![]() . Тогда
. Тогда  .
Следовательно, b должно быть меньше единицы.
Мощность получим из уравнения
.
Следовательно, b должно быть меньше единицы.
Мощность получим из уравнения ![]() . При
. При ![]() ускорение бесконечно при
ускорение бесконечно при ![]() . Если же
. Если же ![]() , то и
мощность, и время сближения – конечные величины, причём ускорение
, то и
мощность, и время сближения – конечные величины, причём ускорение ![]() уменьшается с уменьшением
уменьшается с уменьшением ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.