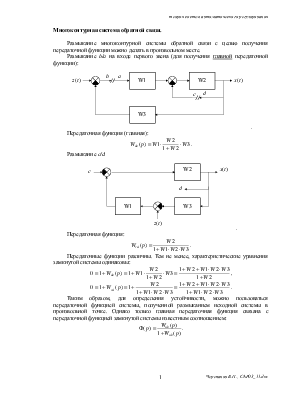
Многоконтурная система обратной связи.
Размыкание многоконтурной системы обратной связи с целью получения передаточной функции можно делать в произвольном месте.
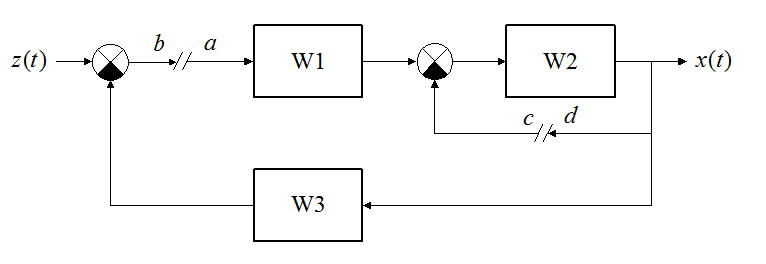
Размыкание b/a на входе первого звена (для получения главной передаточной функции):
 .
.
Передаточная функция (главная):
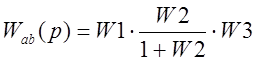 .
.
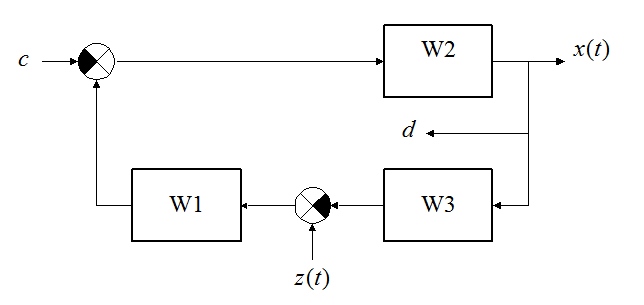
Размыкание c/d:
 .
.
Передаточная функция:
 .
.
Передаточные функции различны. Тем не менее, характеристические уравнения замкнутой системы одинаковы:
 ,
,
 .
.
Таким образом, для определения устойчивости, можно пользоваться передаточной функцией системы, полученной размыканием исходной системы в произвольной точке. Однако только главная передаточная функция связана с передаточной функцией замкнутой системы известным соотношением:
 .
.
Из того обстоятельства, что при исследовании устойчивости замкнутой системы нас интересует только характеристическое уравнение
 ,
,
следует, что для расчёта устойчивости может быть использована преобразованная передаточная функция
 ,
,
где ![]() –
произвольный полином степени меньшей, чем степень полинома
–
произвольный полином степени меньшей, чем степень полинома ![]() , т.к.
, т.к.
 .
.
Многомерные системы регулирования [1].
К многомерным относятся системы, имеющие несколько регулируемых величин:
![]() , (
, (![]() ).
).
Многомерный объект управления описывается системой уравнений, обычно представляемой в матричной форме:
 ,
,  ,
,  .
.
Здесь u, f – управляющие и возмущающие воздействия (векторы).
Уравнения движения в матричной форме:
![]() .
.
Здесь
 ,
,  ,
, 
– квадратная и прямоугольные матрицы операторных коэффициентов.
Для изображений по Лапласу (при нулевых начальных условиях):
![]() .
.
Здесь ![]() ,
, ![]() ,
, ![]() –
матрицы-столбцы изображений регулируемых величин, управляющих величин и
возмущений.
–
матрицы-столбцы изображений регулируемых величин, управляющих величин и
возмущений.
Если
определитель ![]() , то существует обратная матрица
, то существует обратная матрица  . Умножая исходное уравнение слева на
. Умножая исходное уравнение слева на ![]() получим:
получим:
![]() , где
, где ![]() ,
, ![]()
– матрицы передаточных функций объекта для управляющих величин и возмущений.
Путём нахождения обратного преобразования Лапласа для каждого элемента матриц передаточных функций объекта получается так называемая матрица Коши (матрица весовых функций). Например, для управляющих воздействий
 .
.
Если в момент времени ![]() на все входы поступают управляющие воздействия
на все входы поступают управляющие воздействия
![]() , где
, где ![]() , то
изменение j-той регулируемой величины
записывается посредством интеграла Дюамеля-Карстона:
, то
изменение j-той регулируемой величины
записывается посредством интеграла Дюамеля-Карстона:
 .
.
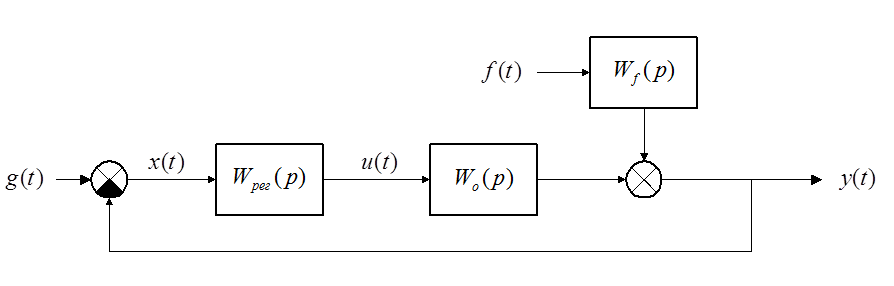
На рисунке ниже
изображена структурная схема замкнутой многомерной системы автоматического
регулирования. Она в точности такая же, как схема одномерной системы, только g, x, u, y, f здесь векторы, а ![]() ,
,
![]() ,
, ![]() –
матрицы.
–
матрицы.
Матрица передаточных функций разомкнутой по всем каналам системы:
![]() .
.
Характеристическая
матрица системы – квадратная матрица размером ![]() , E – единичная матрица:
, E – единичная матрица:
![]() .
.
Характеристическое уравнение – определитель характеристической матрицы:
![]() .
.
Матрицы передаточных функций замкнутой системы, замкнутой системы по ошибке и замкнутой системы по возмущениям:
![]() ,
, ![]() ,
, ![]() .
.
Устойчивость двухмерной системы с антисимметричными связями.
Структурная схема двухканальной системы слежения:
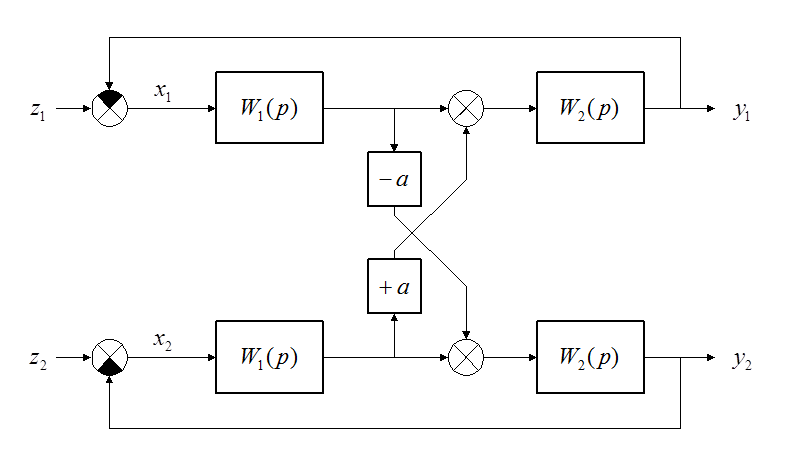 .
.
Связь выходных (регулируемых) величин с ошибками:
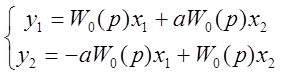 .
.
Здесь ![]() .
.
Матричная запись:
 .
.
Характеристическое уравнение:
 .
.
Здесь
 .
.
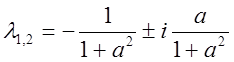
Исследование устойчивости сводится к рассмотрению двух уравнений:
![]() и
и ![]() .
.
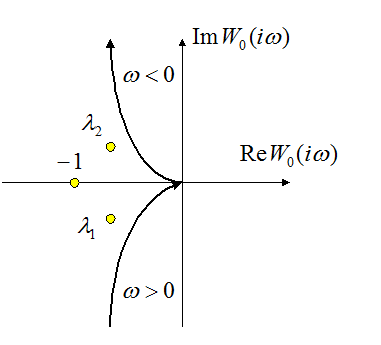
Здесь может
быть использован критерий Найквиста, но вместо точки комплексной плоскости (![]() ), которая соответствует обычной записи
характеристического уравнения
), которая соответствует обычной записи
характеристического уравнения ![]() , необходимо
рассматривать две точки, соответствующие комплексным числам
, необходимо
рассматривать две точки, соответствующие комплексным числам ![]() и
и ![]() .
.
Замкнутая
система будет устойчивой, если АФХ устойчивого в разомкнутом состоянии одного
изолированного канала не будет охватывать точек ![]() и
и ![]() .
.
Колебательная граница
устойчивости будет иметь место, если выполняется одно из равенств ![]() или
или ![]() .
.
Заметим, что
при ![]() обе точки
обе точки ![]() и
и ![]() стягиваются в точку
стягиваются в точку ![]() , что соответствует обычной формулировке
критерия Найквиста.
, что соответствует обычной формулировке
критерия Найквиста.
 .
.
Другой метод расчёта устойчивости двухмерной системы.
Введём ![]() ,
, ![]() ,
, ![]() . Были соотношения:
. Были соотношения:
.
Умножим второе равенство на i и сложим:
![]() .
.
Здесь ![]() –
эквивалентная передаточная функция разомкнутой двухмерной системы,
–
эквивалентная передаточная функция разомкнутой двухмерной системы, ![]() – угол поворота передаточной функции
– угол поворота передаточной функции ![]() по часовой стрелке,
по часовой стрелке, ![]() – коэффициент увеличения модуля
– коэффициент увеличения модуля ![]() .
.
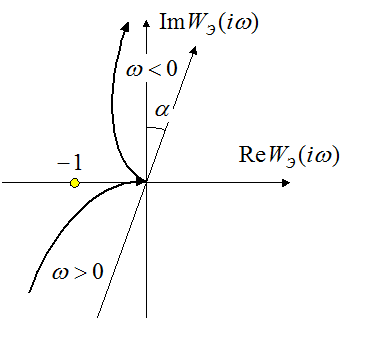
Колебательная
граница устойчивости: ![]() ,
что сводится к
,
что сводится к
 .
.
Это согласуется с первым методом расчёта устойчивости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.