1. П - регулятор уровня жидкости.
Гидравлические регуляторы — это регулирующие устройства, в которых носителем сигнала, реализующим требуемые законы регулирования, является жидкость (обычно минеральное масло или вода).
Основными преимуществами гидравлических регуляторов является возможность обеспечения больших мощностей исполнительных механизмов, их высокая надежность, высокая скорость распространения управляющих сигналов. Датчики гидравлических регуляторов отличаются простотой конструкции и не требуют использования вспомогательной энергии, так как не имеют встроенных усилителей.
Вместе с тем гидравлические регуляторы обладают рядом недостатков, вытекающих в основном из того, что в качестве рабочего агента используется жидкость под давлением. Это требует тщательной герметизации соединительных линий, порождает зависимость параметров регуляторов от температуры и вязкости жидкости. В гидравлических регуляторах легко реализуется интегральный закон регулирования (И-закон), но весьма затруднена реализация пропорционально-интегрального (ПИ-закона) и пропорционально-интегрально-дифференциального (ПИД-закона) законов регулирования с широким диапазоном изменения параметров настройки. Наличие гидропроводов ограничивает допустимые расстояния между отдельными элементами гидравлических регуляторов, в частности, датчики должны устанавливаться в непосредственной близости от регулирующего устройства и задатчика.
Недостатки гидравлических регуляторов, ограничивающие область их применения, обусловили разработку и применение электрогидравлических регуляторов, основанных на использовании электрических и гидравлических устройств.
В электрогидравлических регуляторах регулируемые величины измеряются и контролируются электрическими методами и средствами, а в качестве исполнительных устройств используются гидравлические механизмы.
Применение датчиков с электрическим выходом существенно расширяет число типов регулируемых величин, снимает ограничения на допустимые расстояния между элементами электрогидравлических регуляторов. Использование гидравлических исполнительных механизмов обеспечивает большую выходную мощность.
Коррекция управляющих сигналов в электрогидравлических регуляторах обеспечивается электрическими корректирующими устройствами, конструируемыми на основе пассивных RC-контуров. Это позволяет легко реализовать ПИ-, ПИД- и ПД-законы регулирования с широким диапазоном изменения параметров регулятора.
Необходимость использования двух видов энергии — электрической и гидравлической является недостатком электрогидравлических регуляторов.
Гидравлические регуляторы используются в системах автоматики, в которых для управления объектами требуются значительные усилия и высокое быстродействие при небольших расстояниях между отдельными элементами регуляторов. При этом в таких системах автоматики предпочтительными законами регулирования являются И-, П- и ПИ-законы.
Электрогидравлические регуляторы применяют в системах автоматики, в которых для управления объектами также требуются значительные усилия, но предпочтительнее применять электрические датчики, а также нужно реализовать ПИ- и ПИД-законы регулирования с широким изменением диапазона настройки параметров регуляторов.
Как гидравлические, так и электрогидравлические регуляторы особенно целесообразно применять в системах автоматики, в которых автоматизируемые процессы используют рабочие жидкости регуляторов.
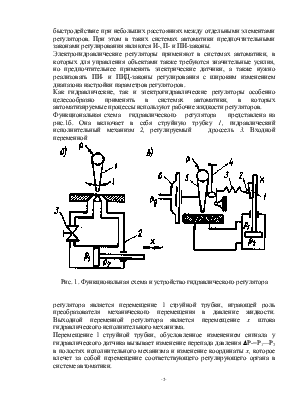
Функциональная схема гидравлического регулятора представлена на рис.1б. Она включает в себя струйную трубку 1, гидравлический исполнительный механизм 2, регулируемый дроссель 3. Входной переменной
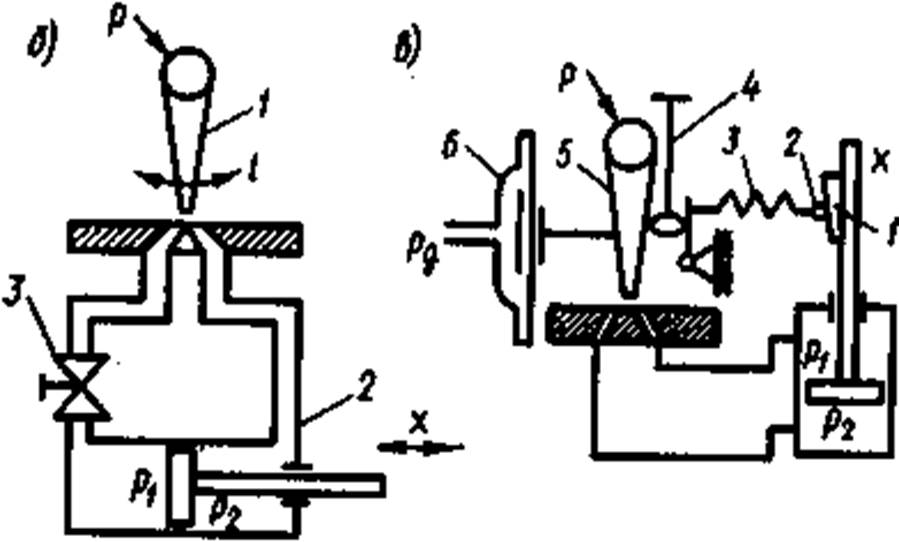
регулятора является перемещение l струйной трубки, играющей роль преобразователя механического перемещения в давление жидкости. Выходной переменной регулятора является перемещение x штока гидравлического исполнительного механизма.
Перемещение l струйной трубки, обусловленное изменением сигнала у гидравлического датчика вызывает изменение перепада давления DР-=Р1—Р2 в полостях исполнительного механизма и изменение координаты х, которое влечет за собой перемещение соответствующего регулирующего органа в системе автоматики.
Переменный дроссель служит для изменения настройки регулятора путем изменения величины давления жидкости.
В гидравлических П-регуляторах перемещение х передается на вход регулятора (в сумматор) через устройство обратной связи. Это устройство реализуется с помощью рычажно-пружинного механизма, преобразующего перемещение выходного органа ИМ в отрицательное перемещение струйной
трубки. Схема простейшего гидравлического П-регулятора, содержащего обратную связь описанного вида, представлена на рис.1 в. Обратная связь в этой схеме содержит лекало 1, ролик 2, пружину 3 и корректор 4, служащий для настройки значения коэффициента усиления обратной связи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.