


Лабораторна робота № 5
Берко А.М.
Варіант № 7
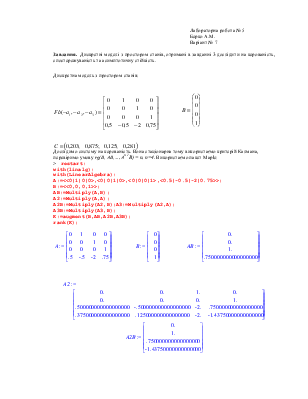
Завдання. Дискретні моделі з простором станів, отримані в завданні 3 дослідити на керованість, спостережуваність та асимптотичну стійкість.
Дискретна модель з простором станів:
 |
![]()
Дослідимо систему на
керованість. Вона стаціонарна тому використаємо критерій Калмана, перевіримо
умову rg(B, АВ,..., Аn-1B) = n, n=4.
Використаємо пакет Maple:
> restart:
with(linalg):
with(LinearAlgebra):
A:=<<0|1|0|0>,<0|0|1|0>,<0|0|0|1>,<0.5|-0.5|-2|0.75>>;
B:=<<0,0,0,1>>;
AB:=Multiply(A,B); A2:=Multiply(A,A); A2B:=Multiply(A2,B);A3:=Multiply(A2,A); A3B:=Multiply(A3,B); K:=augment(B,AB,A2B,A3B);
rank(K);
 |
 |
 |


![]()
Формувати необхідну поведінку системи - це означає описати умови, які повинні задовольняти або процес y(k), або x(k), і знайти таке керування u(k), що завдяки рівнянням (5.1), (5.2) забезпечує виконання цих умов.
Розглянемо двоточкову граничну задачу керування. Задано стани x0, x1 і моменти часу k0 і k1. Потрібно знайти таке керування на інтервалі часу [k0, k1], що переводить подію (k0, x0) у подію (k1, x1) по траєкторії системи (5.1).
З'ясуємо, коли ця задача має Розв’язання. Для цього, користуючись формулою загального розв’язку різницевого рівняння , випишемо умову x(k1) = x1, а саме:
 .
(5.3). Отже, керування u(k), що розв’язує двоточкову граничну задачу, повинно забезпечити виконання
рівності
.
(5.3). Отже, керування u(k), що розв’язує двоточкову граничну задачу, повинно забезпечити виконання
рівності

Критерій Калмана виконується, тому система повністю керована.
Система (5.1) називається k1-досяжною, якщо для будь-якого стану xl існують k0=k0(x1) > -∞ і таке керування, яке переводить систему із стану x0 = 0 у x1. Для одержання умов k1 -досяжності варто розглянути питання можливості розв'язання системи (5.4) при x0 = 0 і будь-якому х1. У цьому випадку v(k0, k1) може бути довільним вектором у Rn, тому (5.6) стає необхідною і достатньою умовою можливості розв'язання цієї задачі.
Теорема . Система (5.1) повністю k1-досяжна тоді і тільки тоді, коли існує k0 > - ∞ і виконується умова (5.6).
Для стаціонарних систем для повної досяжності необхідно і достатньо виконання умови (5.10).
Якщо матриця А - невироджена, то (5.10) також є необхідною і достатньою умовою повної керованості.
Можна показати, що якщо rgА= m, то критерієм повної досяжності є
rg(B,AB,...,An-mB) = n. (5.12)
Задача виявлення (оцінювання) стану х0 на основі даних u[k0, k1] і y[k0, k1] називається задачею спостереження, а виявлення стану x1 - задачею діагностики.
Розглянута система є нестаціонарною, закон її поведінки, що виражається матрицями A(k),B(k) і C(k), змінюється за часом, і розв’язання зазначених задач залежать від інтервалу спостереження [k0, k1]. Тому доцільно першу задачу називати задачею k0-спостереження, а другу k1-діагностики.
Розглянемо питання про можливість розв'язання задачі k0-спостереження.
Становлять інтерес умови на матриці A(k), B(k) і C(k), що забезпечують можливість розв'язання зазначених задач.
Спочатку розглянемо випадок, коли u[k0, k1] = 0 і ƒ(k) = 0.
Нехай х0 - невідомий
стан у момент k0 і y[k0, k1] - відповідний
йому вихід. Оскільки y[k0,k1] може породжуватися й
іншими початковими станами х, то множину усіх таких х позначимо
через Q(x0,k0,k1). Множина Q(x0,k0,k1)
є площиною в Rn. Дійсно, згідно з (5.1) і
(5.2) кожен стан х* ![]() Q(x°,
k0, k1) задовольняє систему рівнянь
Q(x°,
k0, k1) задовольняє систему рівнянь
C(k0)x* = y(k0),
C(k0+1)Ф(k0+1, k0)x* = y(k0+1),
……………………………………… (5.13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.