опускании стола в крайнее нижнее положение.
Оператор следит за тем, чтобы стопа щитов полностью заехала на подъемный стол. После того, как стопа щитов остановится, оператор дает команду на включение загрузчика.
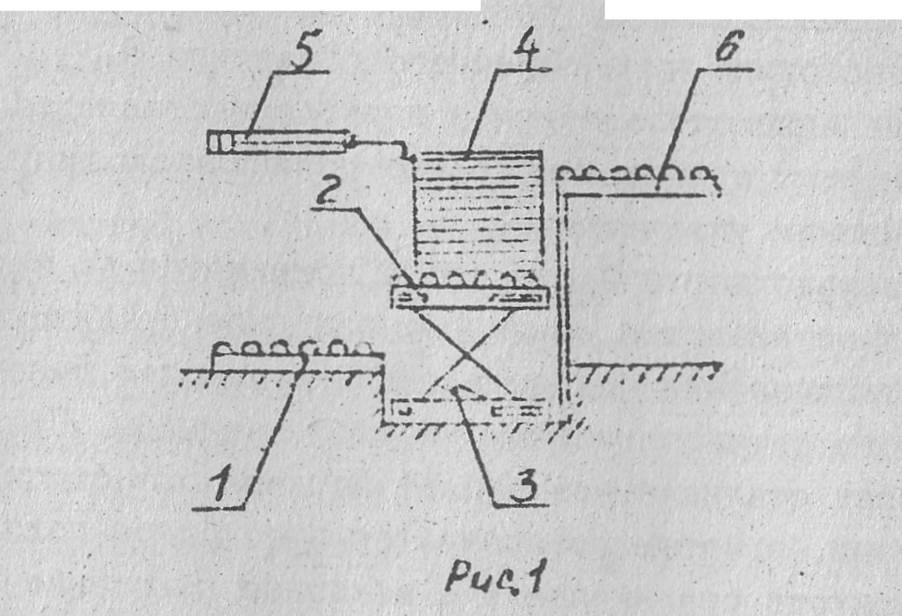
В автоматическом режиме стол начинает подниматься. Подъем должен происходить до тех пор, пока верхний щит стопы не окажется несколько выше приемного рольганга 6.
Перемещение стола вверх и вниз осуществляется с помощью гидроцилиндра 3, управляемого трехпозиционным гидрозолотником с электрическим управлением.
Как только верхний щит стопы поднимется до заданного уровня и стол остановится, начинает движение сталкиватель. Перемещение сталкивятеля осуществляется с помощью, пневмоцилиндпа, управляемого двухпозиционным пневмозолотником. При своем движении вперед сталкиватель подает верхний щит стопы на приемный рольганг, а затем возвращается в исходное положение.
По приходе сталкивателя в исходное положение стол снова начиняет подниматься, подавая следующий щит на уровень сталкивания. Затем снова совершит ход сталкиватель и т.д. Так будет проодолжаться до тех пор, пока не будет убран последний щит. Пустой стол поднимется до крайнего верхнего положения, а затем начнет опускаться. Цикл загрузки одной стопы заканчивается в момент прихода стола в крайнее нижнее положение. Новый цикл начнется после подачи на стол загрузчика следующей стопы.
В системе управления загрузчиком должно быть предусмотрено несколько блокировок. Во-первых, сталкиватель не должен начинать движение до тех пор, пока стол движется. Во-вторых, стол не должен начинать подъем до тех пор, пока сталкиватель не придет в исходное положение. В-третьих, сталкиватель не должен начинать движение, если приемный рольганг 6 занят.
Входные сигналы. Для того, чтобы объект автоматизации функционировал в соответствии с технологическими требованиями, нужно прежде всего, определить минимально необходимое число входных сигналов и сФормулировать условия их появления и исчезновения. В качестве командных органов, формирующих входное воздействия в дискретных системах, могут быгь использованы сигналы кнопок, переключателей, конечных выключателей, датчиков различных параметров и т.п. Входной сигнал можно получить или непосредственно в момент воздействия на командный элемент, или от реле времени, включив его одним из предшествующих входных сигналов. Использование сигналов, появляющихся в момент воздействия на командный элемент, позволяет строить более простые системы управления и, в некоторых случаях, уменьшить число схем памяти. Однако, реализация такой системы обходится дороже, т.к. каждый командный элемент требует больше затрат на установку, коммуникации и уход во время эксплуатации. Системы с реле времени получаются дешевле, но зато и менее точными из-за изменения параметров в процессе эксплуатации.
Выбор вида командных органов должен осуществляться на основе анализа работы объекта автоматизации.
В рассматриваемом примере приняты следующие входные сигналы .
1. Включение системы управления - SB1. Этот сигнал является эквивалентным для сигналов общего управления агрегатом: подачи напряжения на схему, подачи сигнала на начало цикла, отсутствия воздействия на аварийные кнопки "стоп" и т.п. При отсутствии сигнала SB1 работа загрузчика невозможна. Применение эквивалентного сигнала упрощает на данном этапе анализ работы механизма.
2. Подъемный стол в крайнем нижнем - SQ1 (командный эле-
положении. мент - конеч -
ный выключатель)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.