Определим электрическую схему, передаточную функцию и соотношение параметров корректирующего устройства. По виду LОС(ω) определяем корректирующее устройство. Оно показано на рисунке 8.
19
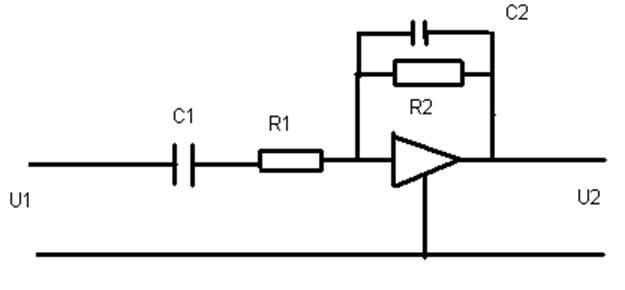
Рисунок 8(электрическая схема)
Передаточная функция имеет вид:
|
|
|
|
|
|
|
|
2.3Вывод: так как требуемый коэффициент передачи меньше исходного, то системе усилитель не нужен. Параллельное включение корректирующего устройства в систему должно деформировать частотную характеристику системы, а значит и фазовую. Эти действия повлекут за собой ожидаемые изменения системы в сторону устойчивости. То есть система должна стать устойчивой.
3. Проверка результатов синтеза.
3.1 Определение запасов устойчивости скорректированной САУ.
Качество системы по ряду причин приходится оценивать по некоторым свойствам, проявляющимся при типовых воздействиях. Для оценки качественных показателей системы используют критерии качества. ИХ много. Остановимся на том критерии, который определяет: насколько далеко от границы устойчивости находится система. Иначе говоря, САУ должна обладать неким запасом устойчивости, как по фазе, так и по модулю. Чем эти показатели больше, тем устойчивей САУ.
Найдем эти запасы для исследуемой системы.
Передаточная функция LЖ(p) имеет вид:
20
Величины Т1 и Т2 определены ранее.
|
|
|
|
|
|
|
|
|
|
Определим запас устойчивости по фазе. Для этого построим АФЧХ LЖ(ω).
|
|
|
|
|
|
|
|
Посчитаем φsum(ω) для разных частот. Данные сведем в таблицу 3.
Таблица 3.
Все характеристики представлены на миллиметровке(рисунок 9).
Как видно из графика АФЧХ не пересекает линию 180 градусов. Это говорит о том, что запас по модулю равен бесконечности. Бесконечность больше, чем 16дБ. Запас по модулю есть. Чтобы найти запас по фазе, нужно снести логарифм частоты среза ЛАЧХ на АФЧХ. Точки
21
пересечения ЛАЧХ с АФЧХ и с линией 180градусов определят запас по фазе. По графику Δφ = 60градусов. Эта величина больше заданной(45градусов), значит и запас по фазе имеется.
3.2 Оценка качества скорректированной системы аналитическим методом.
Для оценки качества скорректированной системы необходимо построить переходную характеристику h(t). Ее можно найти путем решения дифференциального уравнения звена при единичном воздействии и нулевых начальных условиях. Но искать ничего не надо. Смоделируем САУ в программе MATLAB и получим готовый результат. Модель схемы представлена ниже(рисунок 10), как и переходная характеристика.
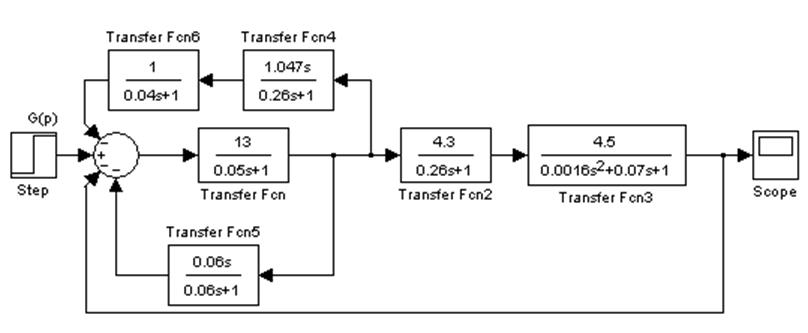
Рисунок10(структурная схма)
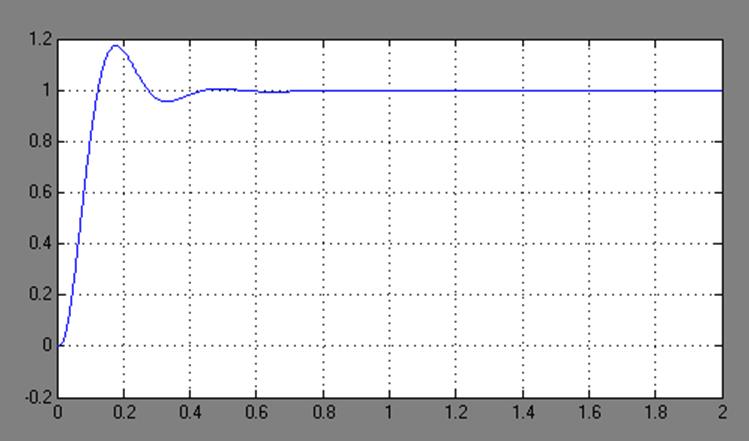
Рисунок11(переходная характеристика)
По полученной характеристике определим основные качественные оценки.
22
а) Изображенный процесс является колебательным. Перерегулирование составляет 18%(максимальное отклонение от установившейся величины) и не превышает 30%. Это удовлетворяет условию.
б) Уровень установившегося режима 0,996
в) Для нахождения время регулирования необходимо рассчитать и построить пятипроцентную зону (5% от установившегося значения) и определить время, за которое характеристика входит в эту зону и больше не выходит из нее. Это время:
|
|
|
|
|
а заданное время |
Из всего этого следует, что САУ удовлетворяет заданным условиям.
Вывод. проверка синтеза показала, что корректирующее устройство было определено верно. Из неустойчивой, система после синтеза стала устойчивой. Полученные в результате синтеза качественные оценки и запасы устойчивости отвечают заданным требованиям.
Списоклитературы
1. Бесекерский В. А., Попов Е. В. Теория систем автоматического регулирования. Изд-во Профессия, 2004-752с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.