З а д а ч а 2
Определение перемещений в статически определимой раме
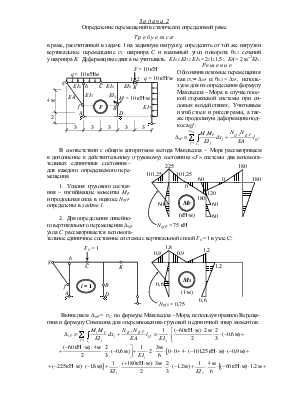
Т р е б у е т с я:
в раме, рассчитанной в задаче 1 на заданную нагрузку, определить от той же нагрузки вертикальное перемещение vCшарнира С и взаимный угол поворота q1-2 сечений у шарнира К. Деформацию сдвига не учитывать. EI1 : EI2 : EI3 = 2 :1:1,5 ; EA = 2 м –2EI1 .
|
|
|
|
|
|
|
|
|
|
|
![]()
![]()
![]()
![]()
|
 зуем для их определения формулу
зуем для их определения формулу
|
|
|
|
|
|

|
|
|
|
|
![]()
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() же продольную деформацию под-
же продольную деформацию под-
|
|
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 .
.
|
|
|
|
 для
каждого определяемого пере-
для
каждого определяемого пере-
|
|
|
|
|

 1. Усилия грузового состоя-
1. Усилия грузового состоя-
![]()

|
|
|
|
![]() определены
в задаче 1.
определены
в задаче 1.
|
2. Для определения линейно-
го вертикального перемещения D1F Ngf,F = 75 кН
узла С рассматривается вспомога-
тельное единичное состояние системы с вертикальной силой F1 = 1 в узле С:
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.