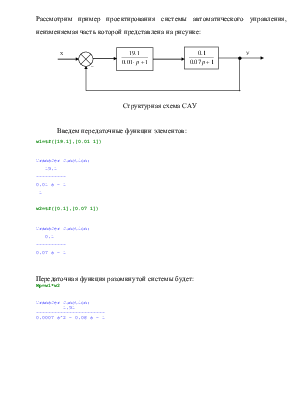


Рассмотрим пример проектирования системы автоматического управления, неизменяемая часть которой представлена на рисунке:
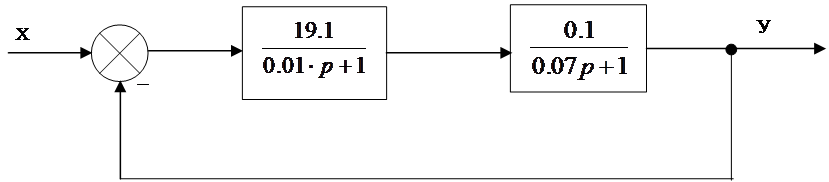
Структурная схема САУ
Введем передаточные функции элементов:
w1=tf([19.1],[0.01 1])
Transfer function:
19.1
----------
0.01 s + 1
1
w2=tf([0.1],[0.07 1])
Transfer function:
0.1
----------
0.07 s + 1
Передаточная функция разомкнутой системы будет:
Wp=w1*w2
Transfer function:
1.91
-----------------------
0.0007 s^2 + 0.08 s + 1
 |
|||
![]()
![]()
|
|
|
|
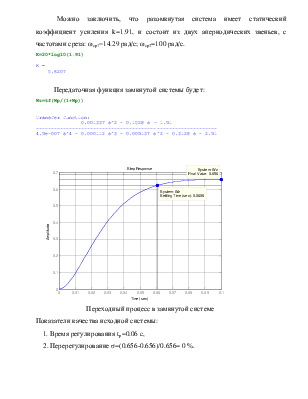
K=20*log10(1.91)
K =
5.6207
Передаточная функция замкнутой системы будет:
Wz=tf(Wp/(1+Wp))
Transfer function:
0.001337 s^2 + 0.1528 s + 1.91
------------------------------------------------------------
4.9e-007 s^4 + 0.000112 s^3 + 0.009137 s^2 + 0.3128 s + 2.91
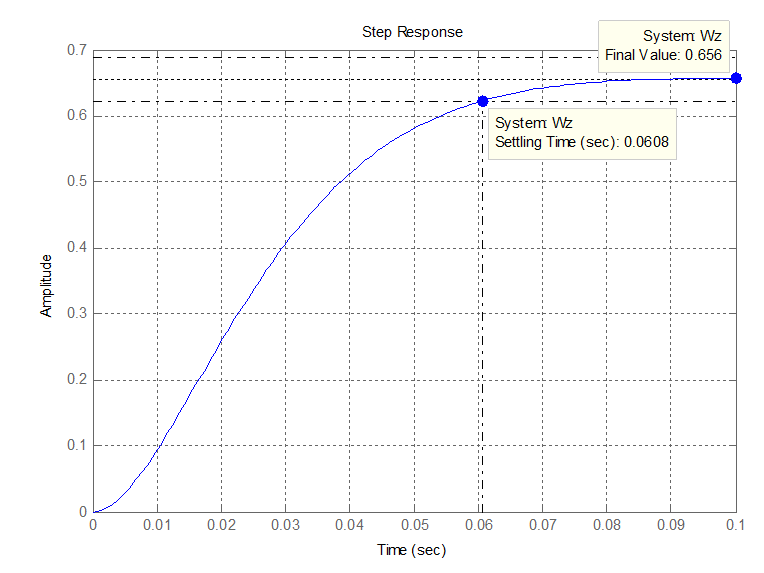
Переходный процесс в замкнутой системе
Показатели качества исходной системы:
1. Время регулирования tp=0.06 c,
2. Перерегулирование σ=(0.656-0.656)/0.656= 0 %.
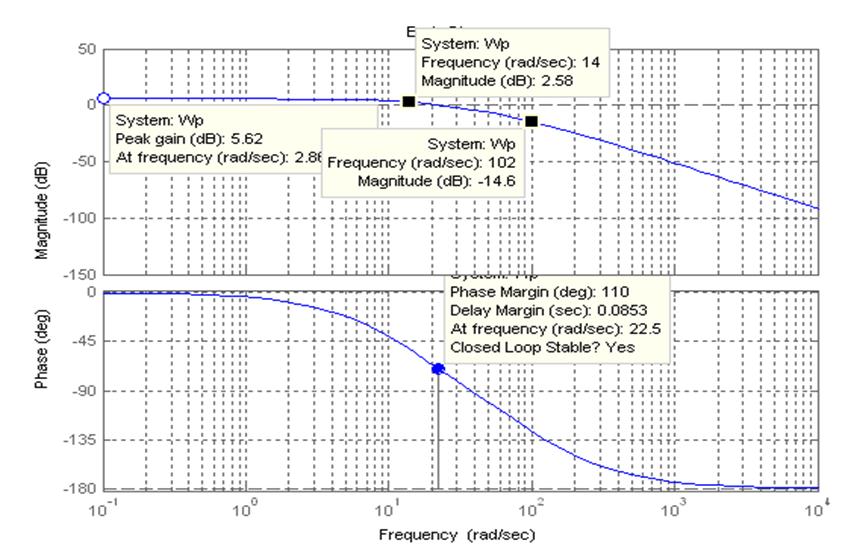
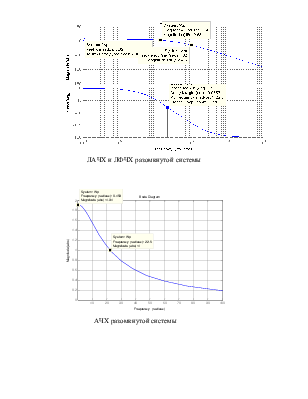
ЛАЧХ и ЛФЧХ разомкнутой системы
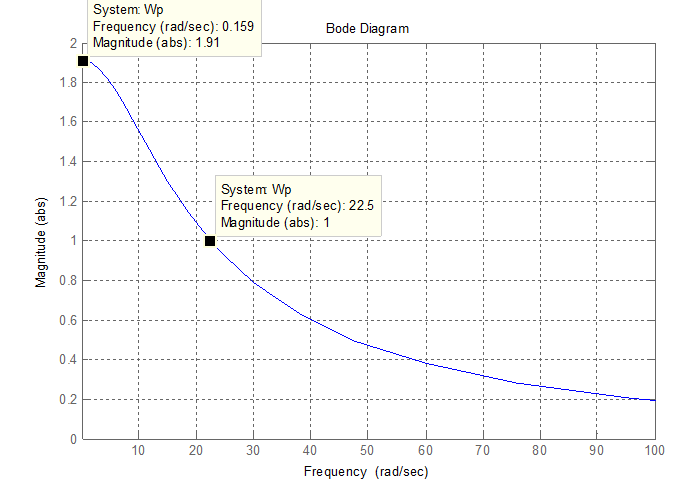
АЧХ разомкнутой системы
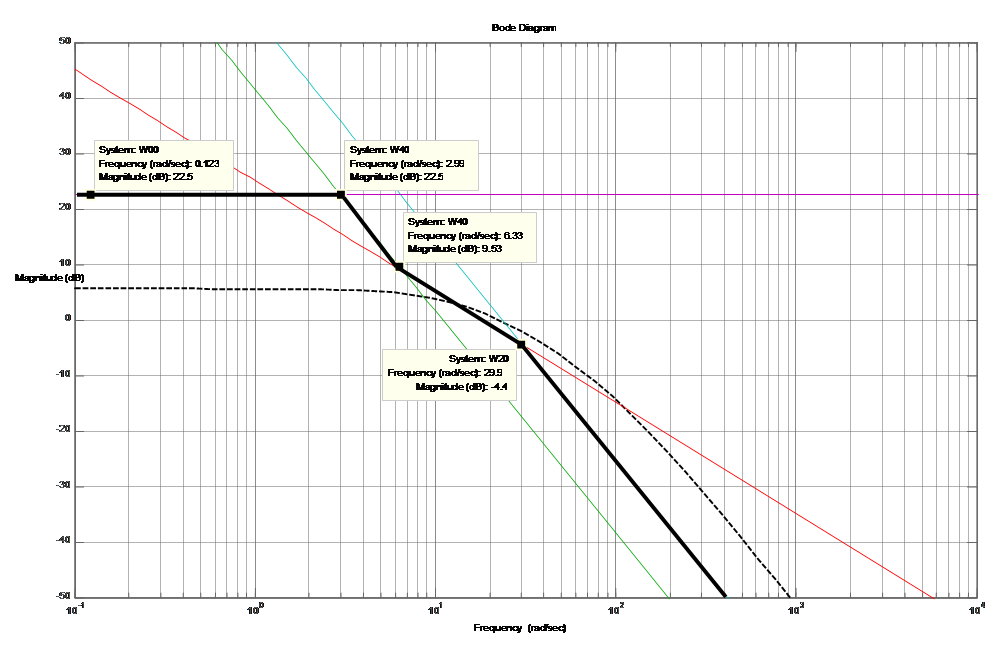
Скоректируем систему методом запретной зоны
Зададим колебательность M=1.5, скорость измененния сигнала g’= 40 с-1, ускорение сигнала g’’= 120 с-2.
Определим кординаты рабочей точки
ωр= g’’/ g’=120/40=3 рад/с - рабочая частота
β0= g’2/ g’’=402/120= 13.3 – рабочая амплитуда 20lg(β0)=22.47 дБ
рабочая точка системы A(3;13.3) – АЧХ и А'(3;22.47) – ЛАЧХ
Вычислим
L1=20*lg(M/(M-1))=9.54 Дб
L1=20*lg(M/(M+1))=-4.43 Дб
Через РТ проводится сопрягающая асимптота с наклоном -40 дБ/дек, до пересечения с верхним уровнем 20lg[M/(M-1)].
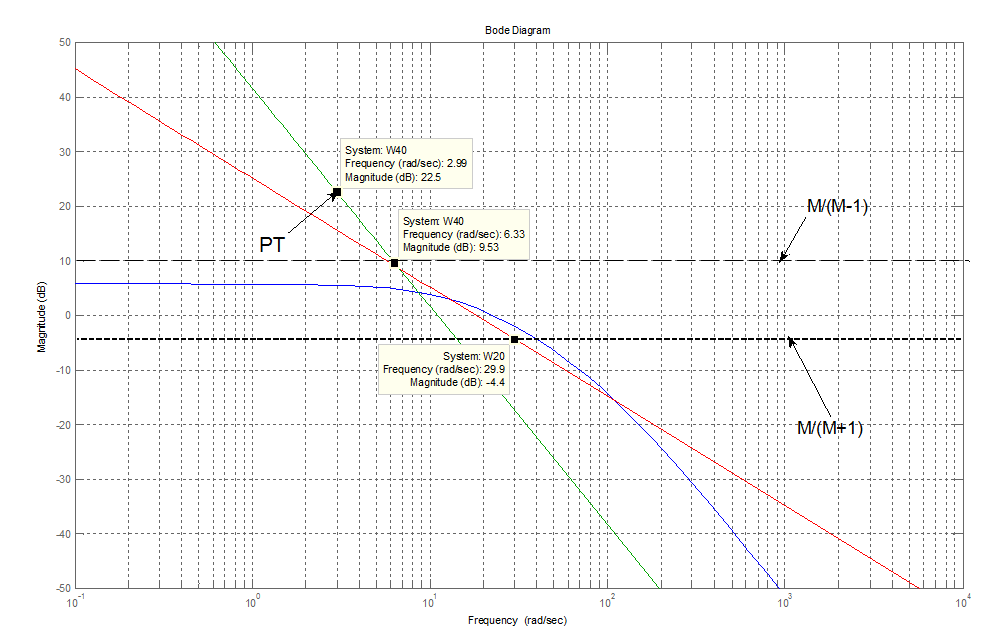
Построение сопрягающей и среднечастотной асимптоты.
Для обеспечения заданной колебательности М строится среднечастотная асимптота, которая имеет наклон -20 дБ/дек, и продолжается до пересечения с нижним уровнем 20lg[M/(M+1)]. При пересечении асимптоты с нулевым уровнем определяется требуемая частота среза ωср скорректированной системы.
Низкочастотная асимптота ЖЛАЧХ продолжается до рабочей точки и должна иметь тот же наклон, что и низкочастотная асимптота ЛАЧХ.
Высокочастотная асимптота ЖЛАЧХ начинается на уровне 20lg[M/(M+1)] и должна иметь тот же наклон, что и высокочастотная асимптота ЛАЧХ.
При этом получим новый коэффициент усиления.
Построение ЖЛАЧХ
Обеспечим одинаковый наклон ЛАЧХ и ЖЛАЧХ до сопрягающей и после среднечастотной асимптоты.
Передаточная функция скорректированной системы будет
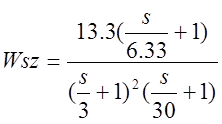
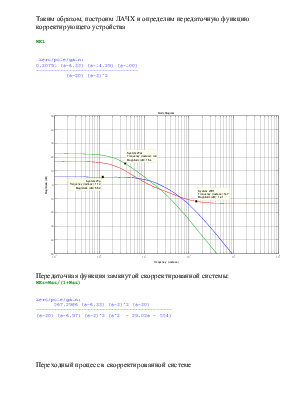
Таким образом, построим ЛАЧХ и определим передаточную функцию корректирующего устройства
WK1
Zero/pole/gain:
0.20791 (s+6.33) (s+14.29) (s+100)
----------------------------------
(s+30) (s+3)^2
Передаточная функция замкнутой скорректированной системы:
WKz=Wsz/(1+Wsz)
Zero/pole/gain:
567.2986 (s+6.33) (s+3)^2 (s+30)
---------------------------------------------
(s+30) (s+6.97) (s+3)^2 (s^2 + 29.03s + 554)
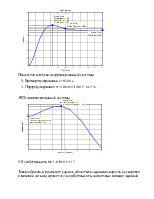
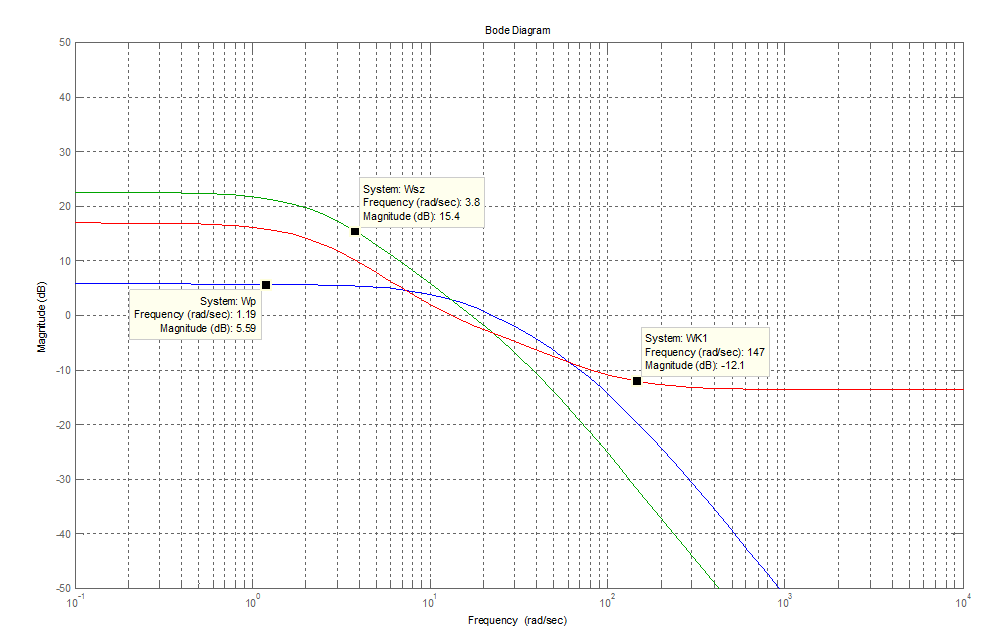
Переходный процесс в скорректированной системе
Показатели качества скорректированной системы:
1. Время регулирования tp=0.249 c,
2. Перерегулирование σ=(1.06-0.93)/0.93= 14.2 %.
АЧХ скорректированной системы
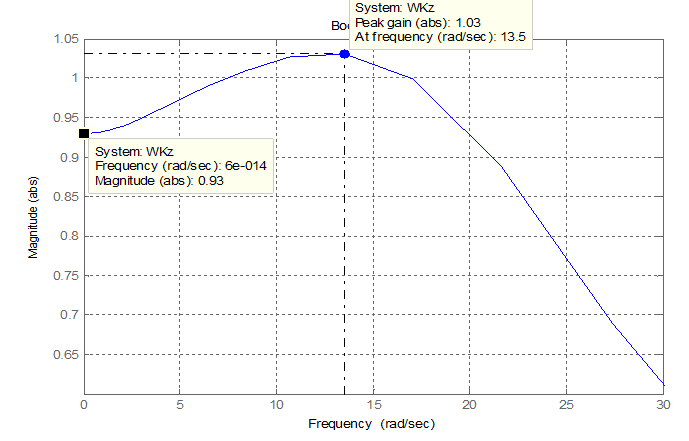
1. Колебательность M=1.03/0.93=1.17
Таким образом, в результате удалось обеспечить заданные скорость и ускорение изменения сигнала, кроме того колебательность значительно меньше заданной.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.