



Лекция №6.
Такой переход позволяет исследовать систему любого порядка. В этом случае проще использовать стандартные матричные операции, чем иметь дело с дифференциальными уравнениями разных порядков. Введем дополнительные переменные: x1,x2…xn. Причем:
x1 = y; ![]()
С учетом этого перепишем уравнение (5):
 (6)
(6)
Учитывая (6) можем записать:
![]()
![]()
…..

 Начальные
условия для сигнала y(t) переходят в начальные условия переменных x1, x2…xn. Для выражения выходной величины
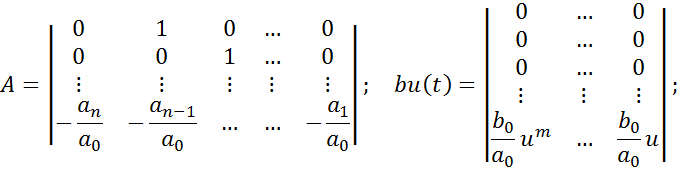
преобразуем выражение (6) в векторно-матричную систему. Заметим что настоящий
выход объекта y(t) равен x1. Можно ввести вектор-строку из n компонентов: C=(1 0 0 0 … 0), при этом x1=1x1+0x2+…+xn. Таким образом, система (7)
может быть переписана:
Начальные
условия для сигнала y(t) переходят в начальные условия переменных x1, x2…xn. Для выражения выходной величины
преобразуем выражение (6) в векторно-матричную систему. Заметим что настоящий
выход объекта y(t) равен x1. Можно ввести вектор-строку из n компонентов: C=(1 0 0 0 … 0), при этом x1=1x1+0x2+…+xn. Таким образом, система (7)
может быть переписана:
![]()
y(t) = Cx(t)
![]()
Решение системы уравнений (8) может быть записано в виде формулы Коши:

Первое слагаемое - общее решение однородного уравнения, второе – частное решение неоднородного уравнения. Формула (9) справедлива вне зависимости от порядка исходного дифференциального уравнения.
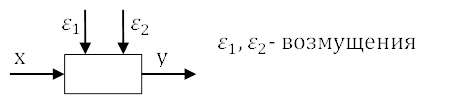
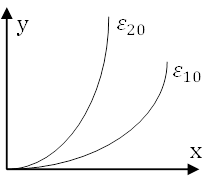
Рассмотренные выше статические характеристики полностью характеризуют поведение элементов САУ в установившихся режимах. Однако, в реальных системах, элементы систем работают вне установившихся, переходных режимах. Это связано с тем, что внешние силы, действующие на систему, непрерывно и случайно изменяются, что приводит к непрерывному изменению входной и выходной величины каждого элемента системы.
Переходным процессом системы называется изменение во времени её состояния с момента появления управляющего или возмущающего воздействия на систему, находившуюся в установившемся или равновесном состоянии до момента установления в ней вновь установившегося состояния.
Рассмотрение переходных режимов элементов автоматики приводит к дифференциальным уравнениям того или иного вида. В результате, физическая задача определения выходной величины элемента системы, при изменяющемся входном сигнале сводится к математической задаче составления дифференциального уравнения и отыскания его решения.
 |
Тогда
дифференциальное уравнение, описывающее этот элемент: ![]()
Неизвестной величиной является y, то есть должны быть заданы начальные условия:
![]()
![]()
![]()
![]()
,
тогда уравнение (10) примет вид: ![]()
 |
Всё это является линейными уравнениями.
При исследовании нелинейных элементов используются нелинейные уравнения, которые линеаризуют, используя метод малых отклонений.
Вывод дифференциальных уравнений звеньев автоматики.
 |
 |
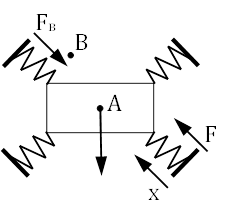
§ массой пружин;
§ жесткостью пружин;
§ количеством и пространством расположения пружин.
То есть
любая конструкция пружин и их расположение в пространстве обеспечивают как
минимум одну устойчивую точку, при которой элемент находится в покое. Если в
некоторый момент воздействовать на элемент в направлении x с силой F, то выходная координата перестанет быть равной
равновесной ![]() ,
а центр масс из точки А переместится в какую-то точку В. Главный вектор всех
сил, действующих на элемент не будет равен 0, так как появится
восстанавливающая сила звена Fв, которая будет стремиться
возвратить центр масс из точи В, в точку А. Численно,
восстанавливающая сила равна силе, которую надо приложить к звену чтобы
удержать центр масс в точке В (Fв = F). В общем случае восстанавливающая сила
функционально связана с обеими координатами x и y.
,
а центр масс из точки А переместится в какую-то точку В. Главный вектор всех
сил, действующих на элемент не будет равен 0, так как появится
восстанавливающая сила звена Fв, которая будет стремиться
возвратить центр масс из точи В, в точку А. Численно,
восстанавливающая сила равна силе, которую надо приложить к звену чтобы
удержать центр масс в точке В (Fв = F). В общем случае восстанавливающая сила
функционально связана с обеими координатами x и y.
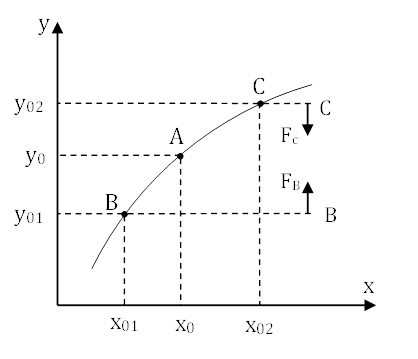
Для точки А, лежащей на равновесной характеристике, восстанавливающая сила равна нулю. Для точки В, у которой координата y меньше у0, восстанавливающая сила больше нуля и направлена вверх, в сторону увеличения у. Для точки С, у которой координата у больше у0, восстанавливающая сила меньше нуля и направлена вниз в сторону уменьшения. Если изменить начальные условия, то начальное равновесное положение звена будет другим. Бесконечно меняя начальные условия получим геометрическое место точек равновесного положения или кривую устойчивости. Пусть возмущающая сила снята, тогда звено стремится в исходное положение каким-либо неизвестным образом. Необходимо решить задачу:
1) вывести дифференциальное уравнение движения звена;
2) решить его;
3) получить условия, при которых звено возвращается в исходное состояние необходимым нам образом.
Пусть
имело место равновесное состояние при координатах х0у0.
Приведенную к элементу массу движущихся частей обозначим через m. Тогда, уравнение движения
элемента можно описать с помощью II
закона Ньютона:![]() (1).
Fc – это сила сопротивления,
включающая силу трения. Из всех сил трения будем учитывать только силу вязкого
трения:
(1).
Fc – это сила сопротивления,
включающая силу трения. Из всех сил трения будем учитывать только силу вязкого
трения:![]() .
Тогда изменится уравнение (1):
.
Тогда изменится уравнение (1):![]() .
.
Введем отклонение от устойчивого равновесия:
![]()
![]()
![]()
![]()
![]()
Здесь:
y и x – текущие значения выходных координат;
![]() – отклонения текущих значений;
– отклонения текущих значений;
x0, y0 – значения координат равновесного состояния.
Исходная
сила восстанавливающей силы при равновесном состоянии при x = x0, y = y0, Fв0 = А; Fв=Fв0 = A = 0. Используя разложение в ряд Тейлора функции двух
переменных с учетом двух первых членов разложения, получим:  (4).
(4).
Индекс 0 означает, что учитываются частные значения производных при равновесном состоянии, то есть при x = x0, y = y0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.