Лекция №3.
Различают следующие значения регулируемой величины:
v предписанное значение регулируемой величины xпр(t) – это значение, соответствующее требуемому режиму работы объекта регулирования;
v действительное значение регулируемой величины xдейств.(t) – соответствующее фактическому режиму работы объекта регулирования;
v ошибка регулирования ∆x(t) – разность между предписанным и действительным значениями;
v статическая ошибка регулирования ∆x(∞) – ошибка в установившемся режиме.
При построении систем управления используют некоторые общие принципы среды, которых следует выделить 3 основных:
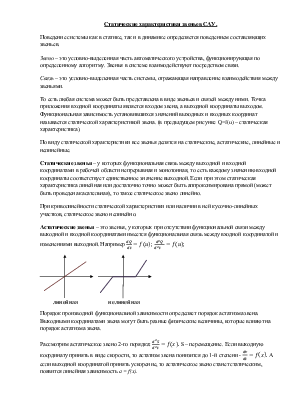
1. Принцип разомкнутого или программного управления.
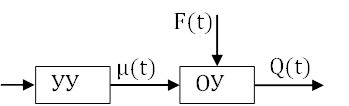
2. Принцип компенсации.
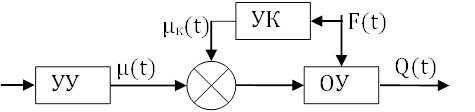
3. Принцип обратной связи или стабилизирующего управления.
 |
 |
Если возмущение можно измерить, то к программному управлению μ(t) добавляется компенсационная составляющая μк(t), которая формируется в устройстве компенсации (УК). С помощью такой корректировки управления можно полностью или частично скомпенсировать влияние внешнего воздействия.
 |
Статические характеристики звеньев САУ.
Поведение системы как в статике, так и в динамике определяется поведением составляющих звеньев.
Звено – это условно-выделенная часть автоматического устройства, функционирующая по определенному алгоритму. Звенья в системе взаимодействуют посредством связи.
Связь – это условно-выделенная часть системы, отражающая направление взаимодействия между звеньями.
То есть любая система может быть представлена в виде звеньев и связей между ними. Точка приложения входной координаты является входом звена, а выходной координаты выходом. Функциональная зависимость установившихся значений выходных и входных координат называется статической характеристикой звена. (в предыдущем рисунке Q=f(u) – статическая характеристика).
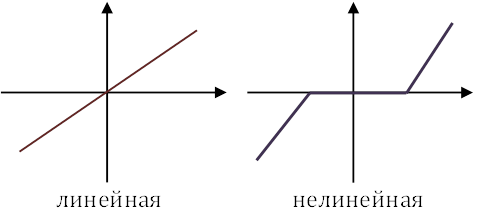
По виду статической характеристики все звенья делятся на статические, астатические, линейные и нелинейные.
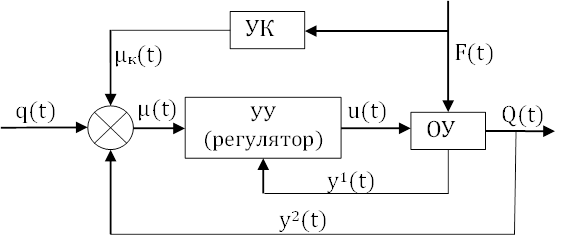
Статические звенья – у которых функциональная связь между выходной и входной координатами в рабочей области непрерывная и монотонная, то есть каждому значению входной координаты соответствует единственное значение выходной. Если при этом статическая характеристика линейная или достаточно точно может быть аппроксимирована прямой (может быть проведена касательная), то такое статическое звено линейно.
При криволинейности статической характеристики или наличии в ней кусочно-линейных участков, статическое звено нелинейно.
 |
Порядок производной функциональной зависимости определяет порядок астатизма звена. Выходными координатами звена могут быть разные физические величины, которые влияют на порядок астатизма звена.
Рассмотрим
астатическое звено 2-го порядка: ![]() S – перемещение. Если выходную координату
принять в виде скорости, то астатизм звена понизится до 1-й степени -
S – перемещение. Если выходную координату
принять в виде скорости, то астатизм звена понизится до 1-й степени - ![]() А если выходной координатой принять ускорение, то
астатическое звено станет статическим, появится линейная зависимость a = f(x).
А если выходной координатой принять ускорение, то
астатическое звено станет статическим, появится линейная зависимость a = f(x).
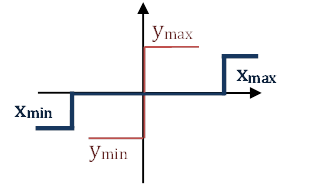 |
То есть, когда выходная координата изменяется скачком. Подобные звенья относятся к нелинейным, называются релейными и имеют параметры срабатывания и отпускания.
Дифференциальная чувствительность звеньев.
Производная
выходной координаты по входной, характеризующая угол наклона касательной к
статической характеристике, называется дифференциальной чувствительностью
звена. ![]()
При
нелинейности статической характеристики дифференциальная чувствительность –
величина переменная, поэтому пользуются понятием – средней дифференциальной
чувствительности, равной тангенсу угла наклона касательной к
линеаризованной статической характеристики ![]() .
.
У
релейного звена на вертикальном участке дифференциальная чувствительность равна
∞, а на горизонтальном – нулю. В этом случае используют понятие коэффициента
управления – равного отношению максимального значения выходной величины к
параметру срабатывания: ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.