ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
по дисциплине
Локальные системы управления
Выполнил ст. гр. УИТ-51
Тужилкин И.В.
Принял
Ефремова Т.А.__________
«____» _____________2004г.
2004
Вариант 27
Передаточная функция непрерывной части системы (разомкнутой цепи) Wrs(s):
 |
Wrs=zpk([-0.00604 -20.04 0],[-100 -20 -1 -0.0833+0.0804i -0.0833-0.0804i],17.0383)
Zero/pole/gain:
17.0383 s (s+0.00604) (s+20.04)
----------------------------------------------
(s+100) (s+20) (s+1) (s^2 + 0.1666s + 0.0134)
То есть
WR=tf(Wrs)
Transfer function:
17.04 s^3 + 341.6 s^2 + 2.062 s
-------------------------------------------------------
s^5 + 121.2 s^4 + 2140 s^3 + 2355 s^2 + 361.6 s + 26.81
По полученной ЖЛАЧХ методом Солодовникова определим передаточную функцию последовательного корректирующего устройства.
Передаточная функция скорректированной системы определяется:
w11=tf([1 0],[1]) - дифференцирующее звено +20дБ/дек
Transfer function:s
w11=tf([1271 0],[1]) - дифференцирующее звено +20дБ/дек
Transfer function:
1271 s
w12=tf([1 0.00604],[1]) - форсирующее звено ω1=0.00604 рад/с +20дБ/дек
Transfer function:
s + 0.00604
w13=tf([1],[74.62 12.43 1]) колебательное звено ω2=0.115 рад/с - 40дБ/дек
Transfer function:
1
-----------------------
74.62 s^2 + 12.43 s + 1
w14=tf([1],[1 1]) апериодическое звено ω3=1 рад/с -20дБ/дек
Transfer function:
1
-----
s + 1
w15=tf([1],[1 20]) - апериодическое звено ω4=20 рад/с 20дБ/дек
Transfer function:
1
------
s + 20
w16=tf([1 20.04],[1]) форсирующее звено ω5=20.04 рад/с +20дБ/дек
Transfer function:
s + 20.04
w17=tf([1],[1 100]) апериодическое звено ω6=100 рад/с -20дБ/дек
Transfer function:
1
-------
s + 100
Передаточная функция разомкнутой скорректированной системы:
GW=8500*zpk(w11*w12*w13*w14*w15*w16*w17)
Zero/pole/gain:
113.9105 s (s+20.04) (s+0.00604)
------------------------------------------------
(s+100) (s+20) (s+0.2) (s^2 + 0.1666s + 0.0134)
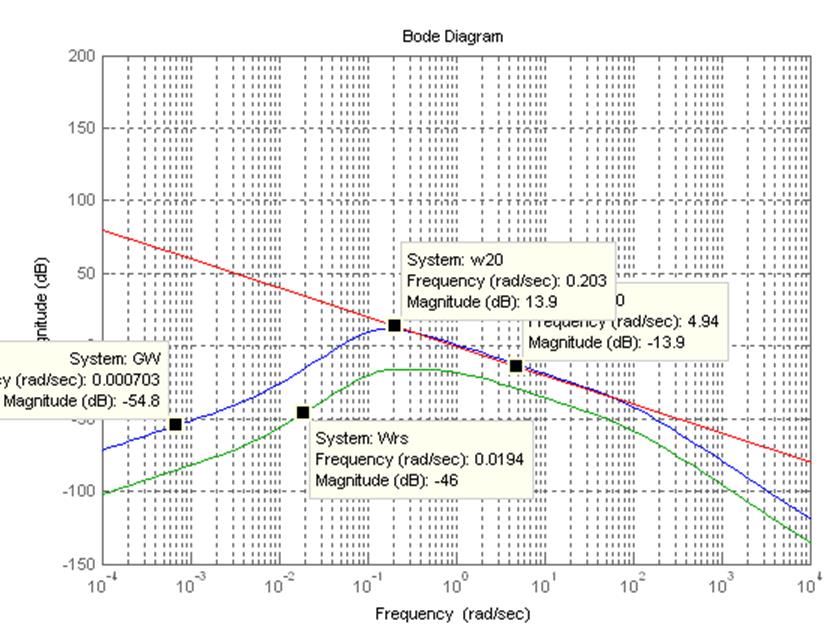
Построение среднечастотной асимптоты и определение сопрягающих частот.
Передаточная функция последовательного корректирующего устройства определяется по виду его ЛАЧХ полученного вычитанием ЛАЧХ разомкнутой системы из ЖЛАЧХ.
WkU=zpk([-1],[-0.2],[6.68])
Zero/pole/gain:
6.68 (s+1)
----------
(s+0.2)
Построение ЛАЧХ последовательного корректирующего устройства
Определим передаточные фукции параллельного и встречно параллельного КУ.
Параллельное КУ:
WkUp=(1-WkU)/(Wrs*WkU)
Zero/pole/gain:
-0.049905 (s+1.141) (s+20) (s+100) (s^2 + 0.1666s + 0.0134)
--------------------------------------------------------------------------
s (s+20.04) (s+0.00604)
Встречно-параллельное КУ:
WkUv=Wrs*(WkU-1)
Zero/pole/gain:
96.7775 s (s+0.00604) (s+1.141) (s+20.04)
------------------------------------------------------
(s+100) (s+20) (s+1) (s+0.2) (s^2 + 0.1666s + 0.0134)
Таким образом выбираем для реализации последовательное корректирующее устройство.
WkU
Zero/pole/gain:
6.68 (s+1)
----------
(s+0.2)
Данную передаточную функцию можно реализовать пассивным четырехполюсником, соединенным с усилителем:
 |
Передаточная функция дифференцирующего четырехполюсника:
 ,
,
где KK1=R2/(R1+R2)=0.2;
T1=R1*C1= 1;
T2=KK1*T1=5.
При этом усилитель должен иметь коэффициент усиления:
Ку=6.68/0.2=33.4.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.