ПОСТРОЕНИЕ ЖЛАЧХ МЕТОДОМ ЗАПРЕТНОЙ ЗОНЫ
Цель работы: Ознакомление с методикой построения желаемой ЛАЧХ методом запретной зоны для синтеза линейных систем автоматического управления с заданными показателями качества. (скорость и ускорение изменения сигнала, а также колебательность)
ОСНОВНЫЕ ПОНЯТИЯ
Оценка качества по показателю колебательности.
Показатель колебательности M определятся из АЧХ замкнутой системы как
 , и характеризует склонность системы к
колебаниям. Чем выше М, тем менее качественна система при прочих равных
условиях. Считается допустимым, если 1.1 ≤ M ≤ 1.5.
, и характеризует склонность системы к
колебаниям. Чем выше М, тем менее качественна система при прочих равных
условиях. Считается допустимым, если 1.1 ≤ M ≤ 1.5.
Если АЧХ системы при нулевой частоте равна 1, то показатель колебательности
где W(jω) – передаточная функция разомкнутой системы.
Чтобы определить показатель колебательности системы,
можно воспользоваться амплитудно-фазовой частотной характеристикой разомкнутой системы W(jω)=u(ω)+jv(ω), где u(ω)=ReW(jω), v=ImW(jω).
Показатель колебательности можно вычислить так:
![]()

Возведя в квадрат обе части равенства, получим
![]()
![]()
После алгебраических преобразований можно записать
![]()
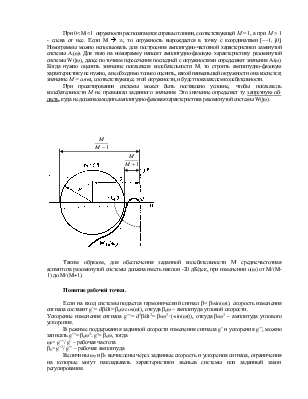
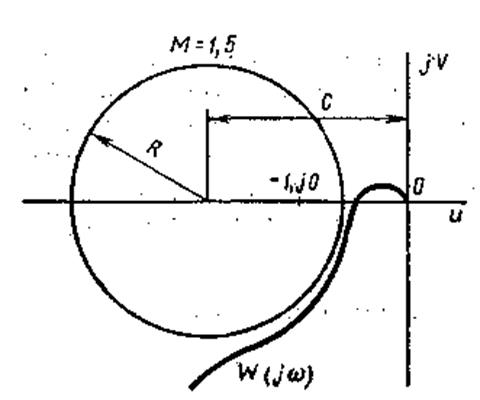
Полученное выражение является центром окружности с радиусом R=M/(M2-1) и центром, смещенном от начала координат влево на величину С=M2/(M2-1). Задаваясь различными значениями М от 0 до ∞, можно построить семейство таких окружностей. При М=1 окружность вырождается в прямую (R à ∞, C à ∞ ), параллельную мнимой оси и проходящую через точку (-0,5, j0).
При 0<M<l окружности располагаются справа от линии, соответствующей М = 1, а при М > 1 - слева от нее. Если M à ∞, то окружность вырождается в точку с координатами [—1, j0]. Номограммы можно использовать для построения амплитудно-частотной характеристики замкнутой системы Aз(ω). Для этого на номограмму наносят амплитудно-фазовую характеристику разомкнутой системы W(jω), далее по точкам пересечения последней с окружностями определяют значения Aз(ω). Когда нужно оценить значение показателя колебательности M, то строить амплитудно-фазовую характеристику не нужно, а необходимо только оценить, какой наименьшей окружности она коснется; значение М = const, соответствующее этой окружности, и будет показателем колебательности.
При проектировании системы может быть поставлено условие, чтобы показатель колебательности М не превышал заданного значения. Это значение определяет ту запретную область, куда не должна заходить амплитудно-фазовая характеристика разомкнутой системы W(jω).
|
Таким образом, для обеспечения заданной колебательности М среднечастотная асимптота разомкнутой системы должна иметь наклон -20 дБ/дек, при изменении u(ω) от M/(M-1) до M/(M+1).
Понятие рабочей точки.
Если на вход системы подается гармонический сигнал β= β0sin(ωt), cкорость изменения сигнала составит g’= dβ/dt= β0ω∙cos(ωt), откуда β0ω – амплитуда угловой скорости.
Ускорение изменения сигнала g’’= d2β/dt2= β0ω2 ∙(-sin(ωt)), откуда β0ω2 – амплитуда углового ускорения.
В режиме поддержания заданной скорости изменения сигнала g’ и ускорения g’’, можно записать g’’= β0ω2; g’= β0ω, тогда
ωр= g’’/ g’ – рабочая частота
β0= g’2/ g’’ – рабочая амплитуда
Величины ωр и β0 вычислены через заданные скорость и ускорения сигнала, ограничения на которые могут накладывать характеристики звеньев системы или заданный закон регулирования.
Если ЛАЧХ разомкнутой системы проходит выше рабочей точки, то система обеспечивает все заданные для нее параметры, если рабочая точка оказывается выше ЛАЧХ то требования не выполняются и система требует коррекции.
Построение желаемой ЛАЧХ.
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Кроме того, могут быть сопрягающие асимптоты, которые соединяют основные.
Строится желаемая ЛАЧХ на основании требований к системе.
Низкочастотная асимптота ЛАЧХ разомкнутой системы определяет статические свойства.
Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы — устойчивость и показатели качества переходной характеристики.
Высокочастотная асимптота желаемой ЛАЧХ мало влияет на свойства системы, поэтому со следует выбирать так, чтобы корректирующее устройство было возможно более простым. Это достигается при совмещении высокочастотных асимптот характеристик исходной и желаемой ЛАЧХ. Если совмещение не удается, то высокочастотная асимптота ЖЛАЧХ должна иметь тот же наклон, что и высокочастотная асимптота ЛАЧХ.
Построение желаемой ЛАЧХ методом запретной зоны начинается с нахождения рабочей точки системы, затем через нее проводится сопрягающая асимптота с наклоном -40 дБ/дек, до пересечения с верхним уровнем 20lg[M/(M-1)].
Для обеспечения заданной колебательности М строится среднечастотная асимптота, которая имеет наклон -20 дБ/дек, и продолжается до пересечения с нижним уровнем 20lg[M/(M+1)]. При пересечении асимптоты с нулевым уровнем определяется требуемая частота среза ωср скорректированной системы.
Низкочастотная асимптота ЖЛАЧХ продолжается до рабочей точки и должна иметь тот же наклон, что и низкочастотная асимптота ЛАЧХ.
Высокочастотная асимптота ЖЛАЧХ начинается на уровне 20lg[M/(M+1)] и должна иметь тот же наклон, что и высокочастотная асимптота ЛАЧХ.
Построение желаемой ЛАЧХ основано на определенных допущениях. Кроме того, могла иметь место приближенная реализация требуемой ЛАЧХ корректирующего устройства. Поэтому совершенно необходима проверка качества синтезированной системы. С этой целью строится переходная характеристика замкнутой системы и определяются показатели ее качества.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.