При проектировании систем автоматического управления и регулирования, как непрерывных, так и дискретных, требуется провести исследование динамических свойств системы, основанное на использовании передаточных функций. Для этого служат графики, отражающие частотные и временные характеристики, а также положение нулей и полюсов системы.
В состав программы MATLAB входит пакет Сontrol System Toolbox, предназначенный для моделирования, анализа и
проектирования САР и САУ.
В пакете реализованы:
- обширный набор средств для анализа одномерных и многомерных динамических систем (объектов);
- построение основных характеристик систем: импульсной, передаточной и переходной, реакция на произвольное воздействие;
- построение частотных характеристик: ЛАЧХ и ЛФЧХ, диаграмм Найквиста, Николса;
- разработка замкнутых систем регулирования;
- проектирование регуляторов.
Интерактивная среда для отображения временного и частотного отклика предоставляют пользователю графические управляющие элементы для одновременного отображения данных откликов и переключение между ними. Можно вычислять различные характеристики откликов, такие, например как время регулирования.
Рассмотрим пример проектирования системы автоматического управления, неизменяемая часть которой представлена на рисунке:
Структурная схема САУ
Введем передаточные функции элементов с помощью функции tf:
w1=tf([19.1],[0.01 1])
Transfer function:
19.1
----------
0.01 s + 1
w2=tf([0.1],[0.07 1])
Transfer function:
0.1
----------
0.07 s + 1
Передаточная функция разомкнутой системы будет:
Wp=w1*w2
Transfer function:
1.91
-----------------------
0.0007 s^2 + 0.08 s + 1
 |
|||
Функция zpk позволяет определить нули, полюса и коэффициент усиления системы:
Wp=zpk(Wp)
Zero/pole/gain:
2728.5714
-----------------
(s+100) (s+14.29)
![]()
![]()
|
|
|
|
K=20*log10(1.91)
K =
5.6207
Передаточная функция замкнутой системы будет:
Wz=tf(Wp/(1+Wp))
Transfer function:
2729 s^2 + 3.118e005 s + 3.898e006
---------------------------------------------------------
s^4 + 228.6 s^3 + 1.865e004 s^2 + 6.384e005 s + 5.939e006
Для вызова графического интерфейса служит функция ltiview, отрывающая специальное средство просмотра временных и частотных характеристик модели – LTI-viewer (LTI systems – Linear Time Invariant Systems линейные, инвариантные во времени системы, в отечественной литературе называют линейными стационарными системами).
ltiview
Окно интерактивного обозревателя
Интерактивный обозреватель взаимодействует с собственной рабочей средой, которая формируется независимо от рабочей среды MATLAB. Поэтому в случай вызова рассматривамой функции без задания аргументов исследуемую модель необходимо поместить в рабочую среду обозревателя.
Для обмена данными между рабочими средами MATLAB и LTI-viewer используются команды меню окна обозревателя File/Import, открывающее диалоговое окно:
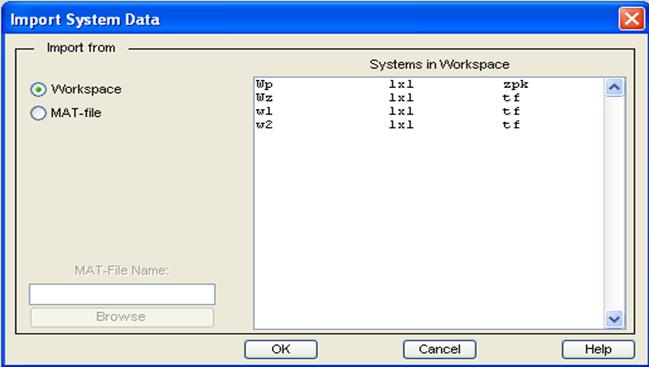
Окно загрузки модели
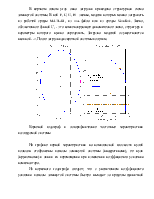
В окне представлены имена моделей, количество их входов и выходов, а также тип. После выбора системы окно загрузки закроется, а в окне обозревателя отразиться график переходного процесса модели (Step).
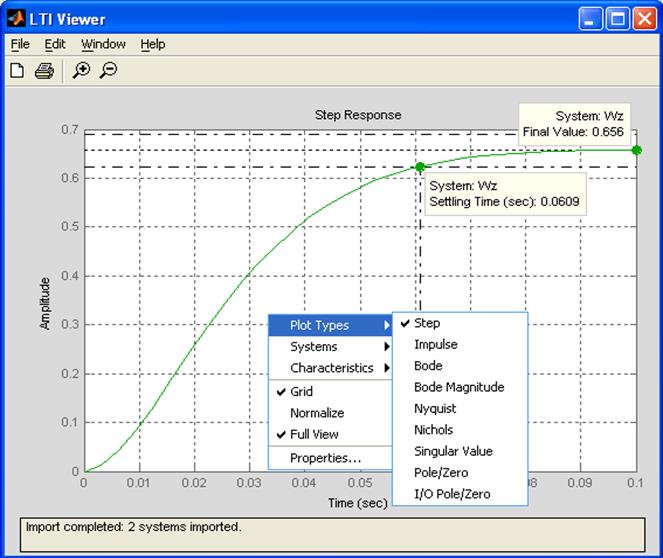
Переходный процесс в замкнутой системе
Если теперь указатель мыши подвести к произвольной точке данного графика и нажать левую кнопку, то появиться всплывающее сообщение об имени системы, величинах абсциссы и ординаты графика. Щелчок правой кнопкой мыши в области графика приведет к появлению контекстного меню, позволяющего выбирать тип графика, отображаемые системы, а также различные характеристики (время переходного процесса, установившееся значение, перерегулирование и т. д.)
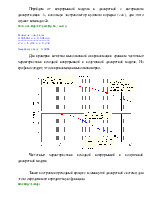
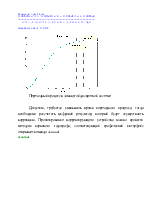
Таким образом, можно получить ЛАЧХ, ЛФЧХ (Bode) и АФЧХ (Nyquist) разомкнутой системы и определить по графикам запасы устойчивости:
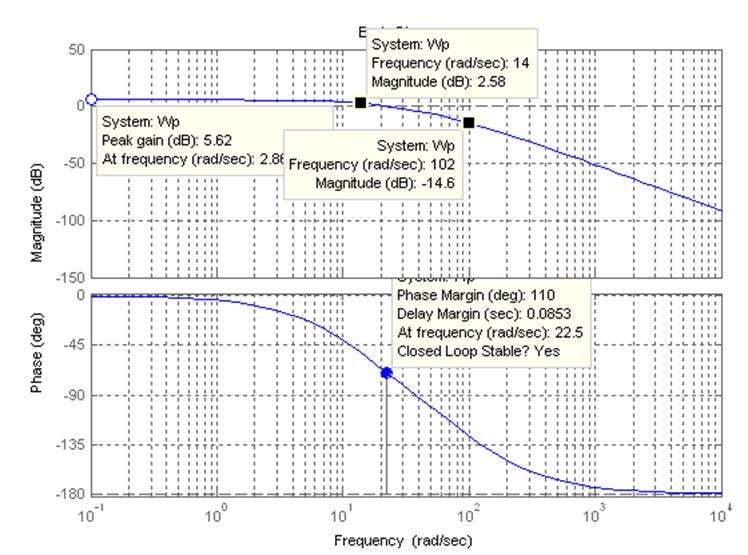
ЛАЧХ и ЛФЧХ разомкнутой системы
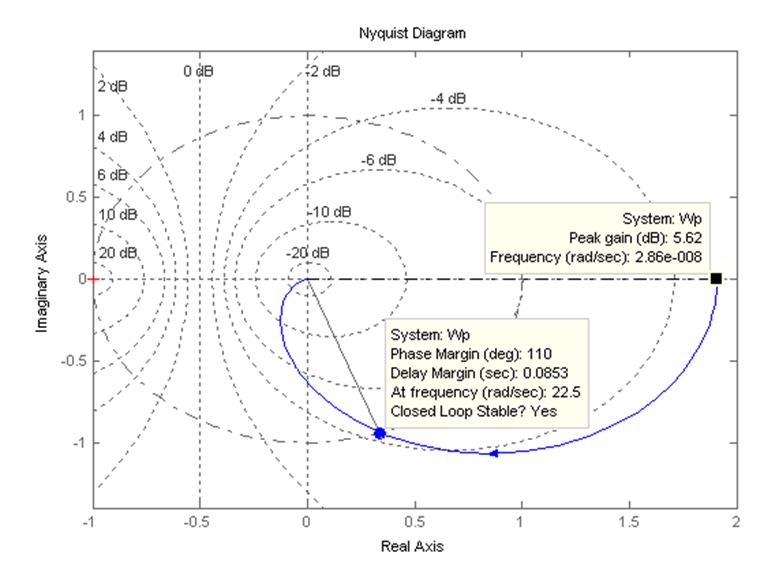
АФЧХ разомкнутой системы
Перейдем от непрерывной модели к дискретной с интервалом дискретизации Ts, используя экстраполятор нулевого порядка ('zoh'), для этого служит команда с2d.
Ts=0.001;Wdp=tf(c2d(Wp,Ts,'zoh'))
Transfer function:
0.001314 z + 0.001265
---------------------
z^2 - 1.891 z + 0.892
Sampling time: 0.0011
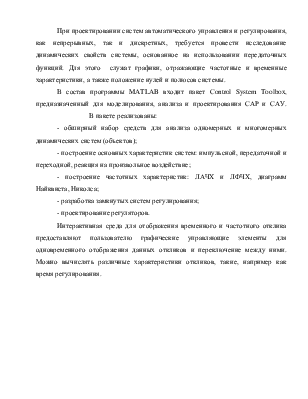
Для проверки качества выполненной аппроксимации сравним частотные характеристики исходной непрерывной и полученной дискретной модели. Из графика следует, что аппроксимация выполнена верно.
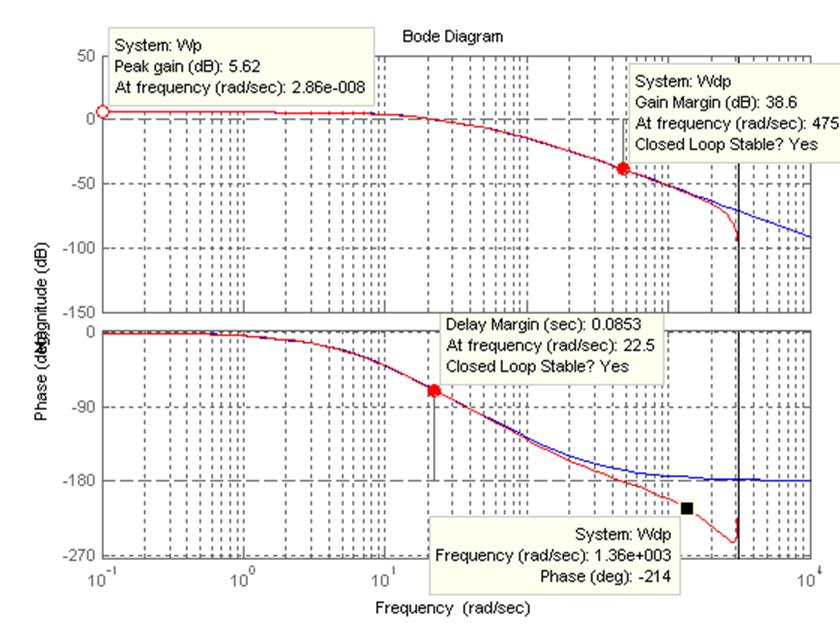
Частотные характеристики исходной непрерывной и полученной дискретной модели
Также построим переходный процесс в замкнутой дискретной системе, для этого определим ее передаточную функцию.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.