![]() (3.7)
(3.7)
то рух системи називається асимптотично
стійким. Умови (3.7) геометрично варто розуміти так: при асимптотичної
стійкості, що зображує точка ![]() будь-якої фазової
траєкторії повинна, ніде не виходити за межі сфери радіуса
будь-якої фазової
траєкторії повинна, ніде не виходити за межі сфери радіуса ![]() , необмежено наближатися до початку координат.
, необмежено наближатися до початку координат.
Це означає, що фізична система, рух якої розглядається, прагне повернутися у свій початковий рівноважний стан.
У випадку неасимптотичної стійкості точка, що ![]() зображує,
описує фазову траєкторію, що не прагне до початку координат, але цілком
розташовану в межах сфери
зображує,
описує фазову траєкторію, що не прагне до початку координат, але цілком
розташовану в межах сфери ![]() радіуса . Це означає,
що досліджувана фізична система, у цьому випадку не прагне повернутися у свій
початковий рівноважний стан, але й не йде від нього далеко.
радіуса . Це означає,
що досліджувана фізична система, у цьому випадку не прагне повернутися у свій
початковий рівноважний стан, але й не йде від нього далеко.
Означення стійкості можна сформулювати й трохи інакше, зберігши при
цьому його сутність: незбурений рух (3.2) називається стійким по Ляпунову, якщо
для ![]() завжди
завжди ![]() таке
таке ![]() що з умов
що з умов
![]()
![]()
при всіх ![]() будуть випливати нерівності
будуть випливати нерівності
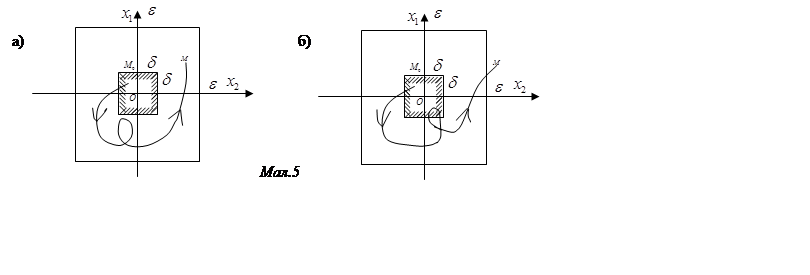 |
У противному випадку, рух називають нестійким (мал.5).
Фізичну систему називають стійкою, якщо стійкий при заданих умовах будь-який її незбурений рух (3.2).
Відзначимо, що визначення стійкості по Ляпунову відрізняється наступними особливостями:
а) передбачається, що малим збурюванням піддаються лише початкові умови. Це означає, що розглянута динамічна система є під впливом лише миттєво діючих збурювань, а збурений її рух відбувається при тих же силах, що й незбурений;
б) стійкість руху розглядається на нескінченно великому проміжку часу.
Реальні динамічні системи часто є під впливом постійно діючих сил, що збурюють, а процеси, що відбуваються в цих системах, звичайно, тривають протягом кінцевого відрізка часу. Дослідження стійкості руху системи в цих практично важливих випадках, як правило, може бути зведене до дослідження стійкості по Ляпунову.
З (3.6) маємо ![]()
![]() Тому що
функції
Тому що
функції ![]() є розв’язанням системи (9.1), то, внесемо
їх у цю систему, одержимо тотожності
є розв’язанням системи (9.1), то, внесемо
їх у цю систему, одержимо тотожності
![]()
![]()
Припускаючи, що функції ![]() задовольняють умовам
розкладності в ряд Тейлора, і, зробивши їхнє розкладання в зазначений ряд,
одержимо
задовольняють умовам
розкладності в ряд Тейлора, і, зробивши їхнє розкладання в зазначений ряд,
одержимо

![]() (3.8)
(3.8)
де ![]() –
сукупність членів, що містять
–
сукупність членів, що містять ![]() й
й ![]() у степені вище першої.
у степені вище першої.
Тому що ![]() теж є розв’язаннями системи
(3.1), тобто
теж є розв’язаннями системи
(3.1), тобто ![]()
![]() те рівності
(3.8) запишуться
те рівності
(3.8) запишуться
 , (3.9)
, (3.9)
де 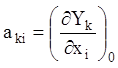 –
функції часу
–
функції часу ![]() (в окремому випадку постійні).
(в окремому випадку постійні).
Система (3.9) називається системою рівнянь збуреного руху.
Позначивши через ![]() всі члени правих частин рівнянь
(3.9), перепишемо рівняння збуреного руху у вигляді
всі члени правих частин рівнянь
(3.9), перепишемо рівняння збуреного руху у вигляді
 .
(3.10)
.
(3.10)
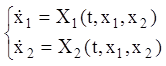
Зокрема, якщо праві частини системи (3.10) не залежать від ![]() , тобто
, тобто
 , (3.11)
, (3.11)
то систему (3.11) називають автономною (стаціонарної), а її рух – сталим. Тоді систему (3.10) називають неавтономною (нестаціонарної), а її рух – несталим. Далі будемо розглядати автономні системи.
З (3.9) маємо, що при ![]() праві частини систем
(3.9) і (3.10) звертаються в нулі, тобто у випадку неавтономної системи
праві частини систем
(3.9) і (3.10) звертаються в нулі, тобто у випадку неавтономної системи ![]() а у випадку автономної –
а у випадку автономної – ![]() Із цього витікає, що функції
Із цього витікає, що функції
![]() ,
, ![]() (3.12)
(3.12)
є розв’язанням системи рівнянь збуреного руху.
У попередньому пункті було показано, що не збуреному руху (3.2) системи
(3.1) відповідають нульові значення всіх варіацій ![]() , тобто
нульове (тривіальне) розв’язання (3.12) рівнянь збуреного руху. Із цього маємо,
що дослідження на стійкість не збуреного руху (3.2) рівносильне дослідженню на
стійкість нульового розв’язання (3.12) рівнянь збуреного руху.
, тобто
нульове (тривіальне) розв’язання (3.12) рівнянь збуреного руху. Із цього маємо,
що дослідження на стійкість не збуреного руху (3.2) рівносильне дослідженню на
стійкість нульового розв’язання (3.12) рівнянь збуреного руху.
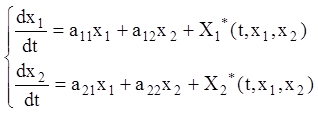
У випадку якщо динамічна система описується лінійною однорідною системою диференціальних рівнянь
 ,
(3.13)
,
(3.13)
то, підставивши в ці рівняння функції
 ,
(3.14)
,
(3.14)
де ![]() –
збурені і незбурені рухи, а
–
збурені і незбурені рухи, а ![]() – варіації, і з огляду
на, що
– варіації, і з огляду
на, що ![]() є розв’язаннями системи (3.13), одержимо
рівняння збуреного руху:
є розв’язаннями системи (3.13), одержимо
рівняння збуреного руху:
 (3.15)
(3.15)
Зрівнявши системи (3.13) і (3.15), робимо висновок, що лінійна однорідна система диференціальних рівнянь одночасно є й системою рівнянь збуреного руху.
Висновок: досліджуючи на стійкість нульове розв’язання системи (3.13), ми тим самим досліджуємо на стійкість будь-яке частинне розв’язання цієї системи. У цьому складається важлива характеристична властивість лінійних систем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.