Практическое занятие 7.
Тема: Принцип максимума Понтрягина.
При решении задач с помощью принципа максимума удобно придерживаться следующего алгоритма:
1. Записываем уравнения объекта в виде системы уравнений первого порядка, не забыв уравнение для функционала:
 .
.
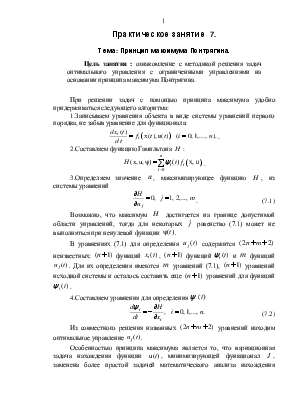
2. Составляем функцию Гамильтона ![]() :
:
 .
.
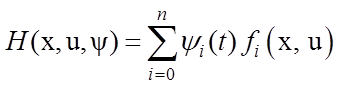
3. Определяем значение ![]() ,
максимизирующее функцию
,
максимизирующее функцию ![]() , из системы уравнений
, из системы уравнений
 .
(7.1)
.
(7.1)
Возможно, что максимум ![]() достигается
на границе допустимой области управлений, тогда для некоторых
достигается
на границе допустимой области управлений, тогда для некоторых ![]() равенство (7.1) может не выполняться при
ненулевой функции
равенство (7.1) может не выполняться при
ненулевой функции ![]() .
.
В уравнениях (7.1) для определения  содержится
содержится ![]() неизвестных:
неизвестных:
![]() функций
функций ![]() ,
, ![]() функций
функций ![]() и
и ![]() функций
функций ![]() .
Для их определения имеются
.
Для их определения имеются ![]() уравнений (7.1),
уравнений (7.1), ![]() уравнений исходной системы и осталось
составить еще
уравнений исходной системы и осталось
составить еще ![]() уравнений для функций
уравнений для функций ![]() .
.
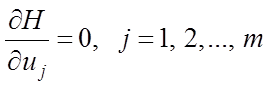
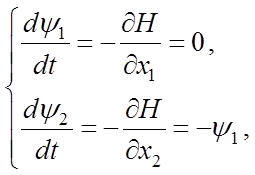
4. Составляем уравнения для определения ![]()
 (7.2)
(7.2)
Из совместного решения названных ![]() уравнений находим оптимальное управление
уравнений находим оптимальное управление ![]() .
.
Особенностью принципа максимума является то, что
вариационная задача нахождения функции ![]() ,
минимизирующей функционал
,
минимизирующей функционал ![]() , заменена более простой
задачей математического анализа нахождения параметра
, заменена более простой
задачей математического анализа нахождения параметра ![]() ,
доставляющего максимум вспомогательной функции
,
доставляющего максимум вспомогательной функции ![]() .
Отсюда, как было сказано ранее, и название метода – принцип максимума.
.
Отсюда, как было сказано ранее, и название метода – принцип максимума.
Напомним, что, используя теорему о максимуме, мы отыскиваем решение не в классе кусочно-гладких функций, а в более широком классе кусочно-непрерывных функций.
Пример 6.1.
Система управления описывается следующими дифференциальными уравнениями:
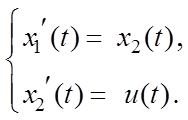 (7.3)
(7.3)
Требуется определить управление ![]() , обеспечивающее быстрейший перевод системы
из состояния
, обеспечивающее быстрейший перевод системы
из состояния ![]() в начало координат
в начало координат ![]() при условии, что управление должно
удовлетворять ограничению
при условии, что управление должно
удовлетворять ограничению ![]() .
.
Решение.
Функционал процесса управления: 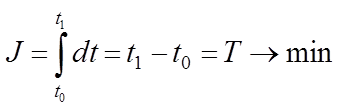 .
.
Таким образом, полная исходная система уравнений объекта будет иметь следующий вид:

Составляем функцию Гамильтона:
 .
.
Из последнего выражения видно, что ![]() достигнет максимального значения, если
достигнет максимального значения, если
![]() .
.
Для вспомогательных функций ![]() и
и ![]() составим
систему сопряженных уравнений (7.2)
составим
систему сопряженных уравнений (7.2)
решая которую, найдем ![]() ,
, ![]() . Следовательно, оптимальное управление
имеет вид
. Следовательно, оптимальное управление
имеет вид
![]() ,
,
т.е. управление с течением времени не более чем один раз меняет знак.
Поскольку линейная функция ![]() на
любом промежутке
на
любом промежутке ![]() меняет знак не более одного
раза, то какова бы ни была начальная точка
меняет знак не более одного
раза, то какова бы ни была начальная точка ![]() ,
соответствующее оптимальное управление является кусочно-постоянной функцией, принимающей
значение
,
соответствующее оптимальное управление является кусочно-постоянной функцией, принимающей
значение ![]() или
или ![]() и
имеющей не более двух интервалов постоянства.
и
имеющей не более двух интервалов постоянства.
Для отрезка времени, на котором ![]() из системы (7.3) находим уравнение
из системы (7.3) находим уравнение
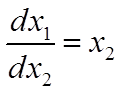 ,
,
после интегрирования которого получим семейство кривых
![]() ,
,
где
![]() – произвольная постоянная интегрирования.
– произвольная постоянная интегрирования.
По этим кривым происходит движение изображающей точки
системы при ![]() . На рис. 7.1 эти траектории изображены с
указанием направления движения (из второго уравнения системы (7.3) видно, что с
возрастанием
. На рис. 7.1 эти траектории изображены с
указанием направления движения (из второго уравнения системы (7.3) видно, что с
возрастанием ![]() координата
координата ![]() возрастает,
поэтому движение изображающей точки происходит снизу вверх).
возрастает,
поэтому движение изображающей точки происходит снизу вверх).
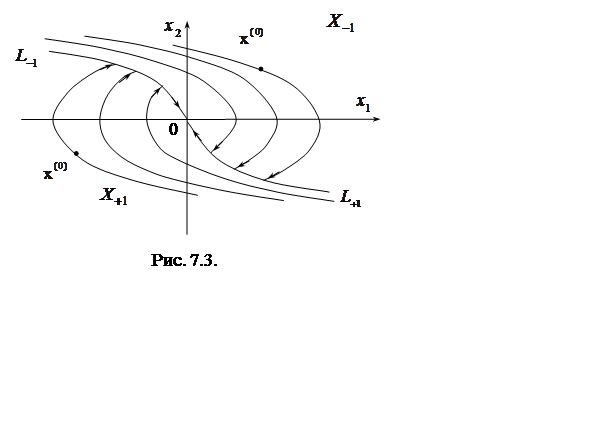
Интегрируя систему уравнений (7.3) при ![]() по аналогии с предыдущим, получим
семейство траекторий (рис. 7.2)
по аналогии с предыдущим, получим
семейство траекторий (рис. 7.2) ![]() .
.
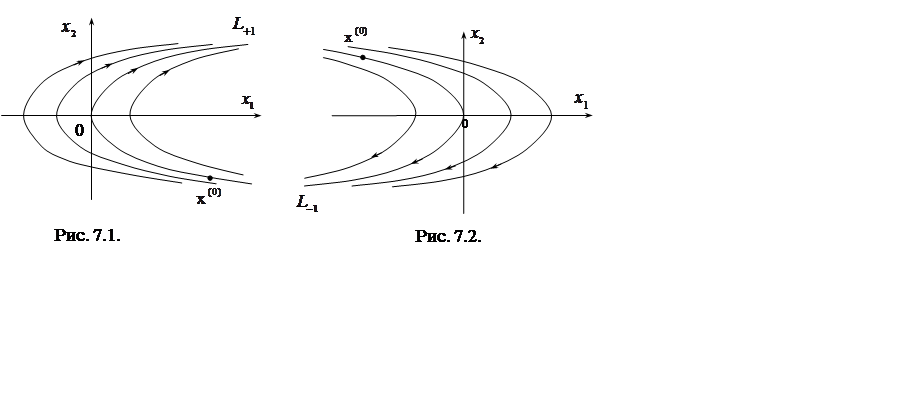 |
В каждом из семейств траекторий имеется лишь одна
полудуга параболы, по которой изображающая точка может приблизиться к началу
координат. На рисунках эти дуги обозначены через ![]() и
и ![]() (индексы равны значениям управлений, при
которых происходит указанное движение).
(индексы равны значениям управлений, при
которых происходит указанное движение).
Если изображающая точка ![]() в
начальный момент времени лежит на дуге
в
начальный момент времени лежит на дуге ![]() , то
оптимальное управление
, то
оптимальное управление ![]() , приводящее систему из точки
, приводящее систему из точки ![]() в начало координат за минимальное время,
равно
в начало координат за минимальное время,
равно ![]() , а траектория системы совпадает с
некоторым куском линии
, а траектория системы совпадает с
некоторым куском линии ![]() (рис. 7.1). Если точка
(рис. 7.1). Если точка ![]() лежит на дуге
лежит на дуге ![]() , то
, то ![]() и траектория системы расположена на
и траектория системы расположена на ![]() (рис. 7.2). Только в этих двух случаях
оптимальное управление постоянно (в смысле знака) в течение всего времени
движения. Во всех других случаях расположения начальной точки
(рис. 7.2). Только в этих двух случаях
оптимальное управление постоянно (в смысле знака) в течение всего времени
движения. Во всех других случаях расположения начальной точки ![]() на плоскости
на плоскости ![]() оптимальное
управление
оптимальное
управление ![]() меняет свое значение либо с
меняет свое значение либо с ![]() на
на ![]() , либо
с
, либо
с ![]() на
на ![]() . Оптимальные
траектории в этих случаях также состоят из двух частей – одна часть совпадает с
куском параболы семейства
. Оптимальные
траектории в этих случаях также состоят из двух частей – одна часть совпадает с
куском параболы семейства ![]() (если вначале
(если вначале ![]() ) , по которому движение происходит до
момента пересечения ее с линией
) , по которому движение происходит до
момента пересечения ее с линией ![]() , а другая часть
совпадает с куском линии
, а другая часть
совпадает с куском линии ![]() от упомянутой точки
пересечения до начала координат. Аналогичный переход фазовой точки происходит
на линию
от упомянутой точки
пересечения до начала координат. Аналогичный переход фазовой точки происходит
на линию ![]() , если вначале
, если вначале ![]() . На
рис. 7.3 изображено все семейство фазовых траекторий рассматриваемой системы.
. На
рис. 7.3 изображено все семейство фазовых траекторий рассматриваемой системы.
 |
Как видим, фазовая плоскость ![]() разделяется
линиями
разделяется
линиями ![]() и
и ![]() на две
части:
на две
части: ![]() и
и ![]() . Если
точка
. Если
точка 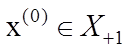 (
(![]() ) , то
фазовая точка должна двигаться под воздействием оптимального управления
) , то
фазовая точка должна двигаться под воздействием оптимального управления ![]() (
(![]() ) до
линии
) до
линии ![]() (
(![]() ), после
чего ее движение происходит по этой линии под воздействием управления
), после
чего ее движение происходит по этой линии под воздействием управления ![]() (
(![]() ).
Отсюда видно, что на линии
).
Отсюда видно, что на линии ![]()
![]() происходит
переключение знака управления. Благодаря такому свойству, эту линию называют линией
переключения.
происходит
переключение знака управления. Благодаря такому свойству, эту линию называют линией
переключения.
Пример 7.2.
Пусть система управления описывается уравнениями вида
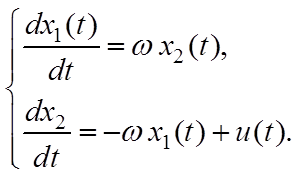 (7.4)
(7.4)
Это система с мнимыми собственными значениями ![]() ,
, ![]() и с
одним входным управлением (гармонический осциллятор с одним входом).
и с
одним входным управлением (гармонический осциллятор с одним входом).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.