Лекция 5
Тема: Наблюдаемость в линейных системах
управления.
1. Полная и неполная наблюдаемость в многомерной системе управления.
2. Критерий наблюдаемости.
3. Частные случаи критерия наблюдаемости в стационарной системе.
4. Двойственность понятий управляемости и наблюдаемости для стационарной системы управления.
При функционировании реальных систем управления важным является процесс
определения координат вектора состояния системы в определенные моменты времени ![]() . Можно произвольно менять состояние
замкнутой системы в том случае, если все компоненты вектора состояния доступны
для измерения.
. Можно произвольно менять состояние
замкнутой системы в том случае, если все компоненты вектора состояния доступны
для измерения.
На практике, как правило, не все компоненты вектора состояния доступны для измерения (например, потому, что часть переменных состояния в принципе нельзя измерить). Обычно выходными величинами объекта служат лишь отдельные компоненты вектора состояния, либо линейные комбинации этих компонент. В связи с этим в теории управления рассматриваются так называемые задачи о наблюдаемости, основным содержанием которых является установление алгоритмов определения части или всех координат системы при условии, что известна другая часть координат или некоторые функции от этих координат, а также математическая модель системы управления в виде системы дифференциальных уравнений.
Пусть система управления описывается следующими уравнениями:
 (5.1)
(5.1)
где
![]() ,
, ![]() ,
, ![]() – непрерывные матрицы порядка
– непрерывные матрицы порядка ![]() ,
, ![]() ,
, ![]() соответственно;
соответственно; ![]() –
–
![]() -вектор выходных (измеряемых) координат
системы управления.
-вектор выходных (измеряемых) координат
системы управления.
Наша цель состоит в том, чтобы для системы (5.1)
восстановить вектор состояния ![]() или найти оценку этого
вектора
или найти оценку этого
вектора ![]() по данным о входной
по данным о входной ![]() и выходной
и выходной ![]() переменным
системы. Близость оценки
переменным
системы. Близость оценки ![]() к истинному вектору
состояния
к истинному вектору
состояния ![]() понимается, по крайней мере, в двух
смыслах: либо как стремление ошибки оценки к нулю, т.е.
понимается, по крайней мере, в двух
смыслах: либо как стремление ошибки оценки к нулю, т.е. ![]() при
при
![]() , либо как точное совпадение вектора
состояния
, либо как точное совпадение вектора
состояния ![]() и вектора оценки
и вектора оценки ![]() в
момент
в
момент ![]() после наблюдения выходных
переменных объекта в течение конечного отрезка времени
после наблюдения выходных
переменных объекта в течение конечного отрезка времени ![]() при
при
![]() или
или ![]() при
при ![]() .
.
В нестационарной линейной системе различают следующие две задачи об оценке текущего состояния системы: задача наблюдаемости и задача идентифицируемости системы управления.
Задачей наблюдения называют задачу оценки состояния системы в момент времени ![]() по известным входным и выходным
воздействиям, измеренным в будущем, т.е. по данным
по известным входным и выходным
воздействиям, измеренным в будущем, т.е. по данным ![]() и
и ![]() при
при ![]() .
.
Задачей идентификации называют задачу определения состояния системы в
момент времени ![]() по данным о входных и выходных
величинах, измеренных в прошлом, т.е. по данным
по данным о входных и выходных
величинах, измеренных в прошлом, т.е. по данным ![]() и
и
![]() при
при ![]() .
.
Часто не делают различия между задачей наблюдения и задачей идентификации, объединяя оба эти понятия термином наблюдаемость. Иногда определяют наблюдаемую систему как систему, в которой по прошлым значениям выходных величин можно судить о состоянии в настоящий момент времени. Этого определения мы и будем придерживаться.
Определение. Задача
нахождения вектора ![]() состояния системы (5.1) или
отдельных его компонент по известной на некотором промежутке
состояния системы (5.1) или
отдельных его компонент по известной на некотором промежутке ![]() функции
функции
![]() ,
(5.2)
,
(5.2)
где
![]() – известная прямоугольная матрица
размерности
– известная прямоугольная матрица
размерности ![]() , называется задачей наблюдаемости
линейной системы (5.1). При этом
, называется задачей наблюдаемости
линейной системы (5.1). При этом ![]() – функция выхода
системы (5.1).
– функция выхода
системы (5.1).
Определение.
Если задача наблюдаемости для системы (5.1) имеет решение, то система
называется полностью наблюдаемой или частично наблюдаемой в зависимости
от того, все или часть компонент вектора ![]() удается
установить.
удается
установить.
Определение.
Пара матриц ![]() ,
, ![]() называется
наблюдаемой, если можно решить задачу о наблюдаемости для системы (5.1)
по известному вектору выхода (5.2).
называется
наблюдаемой, если можно решить задачу о наблюдаемости для системы (5.1)
по известному вектору выхода (5.2).
Рассмотрим вначале наиболее простое решение задачи о
наблюдаемости однородной системы (5.1) при ![]() и
достаточные условия наблюдаемости пары матриц
и
достаточные условия наблюдаемости пары матриц ![]() ,
, ![]() .
.
Теорема 4.4. Пусть
для каждого значения ![]() существуют и известны
существуют и известны ![]() производные от вектора выхода (5.2)
системы (5.1). Тогда для существования решения задачи о наблюдаемости системы
(5.1) в фиксированной точке
производные от вектора выхода (5.2)
системы (5.1). Тогда для существования решения задачи о наблюдаемости системы
(5.1) в фиксированной точке ![]() в виде линейной
комбинации от значений
в виде линейной
комбинации от значений ![]() и ее производных
и ее производных ![]() достаточно, чтобы
достаточно, чтобы
![]() ,
(5.3)
,
(5.3)
где
 ,
(5.4)
,
(5.4)
![]() ,
,  .
.
Доказательство. Продифференцируем ![]() раз
соотношение (5.2), тогда получим
раз
соотношение (5.2), тогда получим ![]() равенств
равенств
![]()
 ,
,
. . . . . . . . . . . . . . . . . . . . . .
 ,
,
рассматриваемых как система линейных алгебраических
уравнений относительно компонент вектора ![]() .
Для существования решения данной системы достаточно, чтобы ранг ее матрицы
равнялся
.
Для существования решения данной системы достаточно, чтобы ранг ее матрицы
равнялся ![]() .
.
Но ранг этой матрицы равен рангу сопряженной матрицы,
т.е. рангу матрицы ![]() , что и требовалось доказать.
, что и требовалось доказать.
Замечание 1. В частном случае, когда вектор выхода является скалярной
величиной, т.е. если ![]() –
– ![]() -мерная
вектор–функция, соотношение (5.4) примет вид
-мерная
вектор–функция, соотношение (5.4) примет вид
 ,
(5.5)
,
(5.5)
где
![]() ,
,  .
.
Замечание 2. В случае, если система (5.1) стационарна и ![]() , то матрица (5.4)
, то матрица (5.4) ![]() примет
вид
примет
вид

или
 ,
,
а
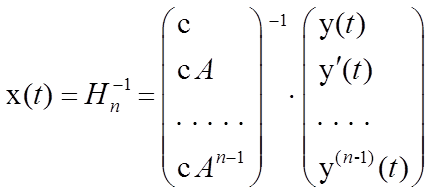
формула (5.5) при ![]() :
:
 .
.
При этом фазовые координаты можно определить следующим образом:
Замечание 3. Решение задачи о наблюдаемости при использовании значений вектора выхода и его производных иногда становится неудобным для практического применения в конкретных системах управления, поскольку при этом требуется вычислять производные от заданной функции, что сопряжено с большими трудностями.
Рассмотрим другой подход к задаче наблюдаемости систем [1].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.