где Тξ — коэффициент, характеризующий время перекладки шайбы корректора из одного крайнего положения о другое; ka = kaUao — коэффнипент, характеризующий эффективность влияния системы распределения активных нагрузок между генераторами на перемещение золотника регулятора; kω = kykffo — коэффициент характеризующий эффективность влияния точного канала регулирования на перемещение золотника; ξ = Δl/lo — относительное перемещение шайбы червячного редуктора корректора; ν = Δf/fo = Δω/ωo—относительное изменение частоты тока; ua = ΔU/Uao —относительное изменение сигнала измерителя активной мощности.
В современных интегральных гидромеханических приводах регулятор угловой скорости (грубый канал) позволяет стабилизировать частоту синхронного генератора с погрешностью не более ±1%1, поэтому корректор частоты для таких приводов (рис. 2.6) используется только для синхронизации генераторов перед их включением на параллельную работу и для выравнивания активных нагрузок между параллельно работающими генераторами. Входными сигналами корректора являются: сигнал с устройства синхронизации УС генераторов и сигнал с измерителя активной мощности ИАМ, а исполнительным элементом корректора служит катушка электромагнита ЭМ (рис. 2.7). В качестве грузов центробежного тахометра используют постоянные магниты. Положение штока центробежного тахометра зависит от частоты вращения выходного пала ППЧВ и от значения тока iэм, протекающего по обмотке электромагнита.
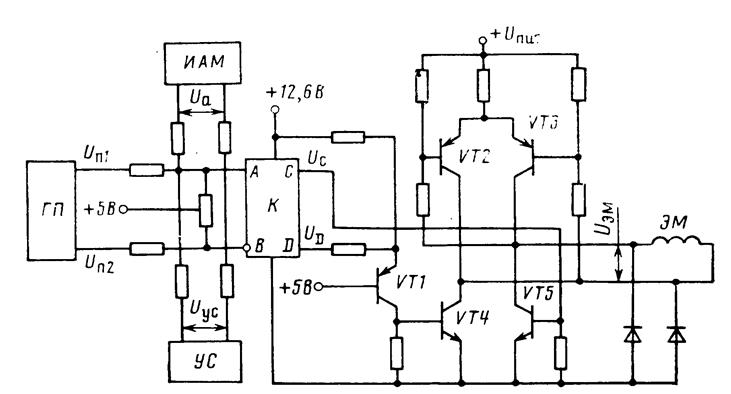
Рис. 2.6. Схема корректора интегрального гидромеханического привода
Изменяя ток в обмотке электромагнита, можно выравнивать частоты генераторов перед их включением на параллельную работу или перераспределять активную мощность между параллельно работающими генераторами.
В состав схемы рис. 2.6 входят: генератор пилообразного напряжения ГП, компаратор К, реверсивный усилитель мощности, выполненный на транзисторах VT1 — VT5. Компаратор имеет два входа А и В и два выхода D и С и реализует следующую функцию:
где UА, UВ, UС, UD — напряжении на соответствующих входах и выходах компаратора.
Измеритель активной мощности и устройство синхронизации не работают одновременно, поэтому для режима выравнивания активных нагрузок
![]()
где Uп1 и Uп2 — напряжения на выходах генератора пилообразных сигналов; Uа — напряжение на выходе ИАМ.
Сигнал на выходе компаратора будет иметь вид прямоугольных импульсов (рис. 2.8), причем при изменении значения Uа коэффициент заполнения импульсов γ = tи/Т будет меняться, т. е. компаратор и генератор пилообразного сигнала образуют широтноимпульсный модулятор. На рис. 2.8, а, б показаны соотношения между сигналами схемы для двух различных значений сигналов с датчика ИАМ.
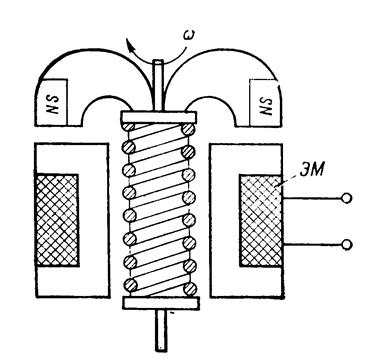
Рис. 2.7 Электромагнитный корректор частоты
В момент появления импульсов на выходе UД (см. рис. 2.6) открываются транзисторы VT4, VT3, а при появлении импульсов на Uc — транзисторы VT2, VT5. Полагая, что индуктивность катушки электромагнита достаточно велика, iэм = U/R*(2γ - 1), где U — напряжение питания усилителя; R — сопротивление катушки электромагнита.
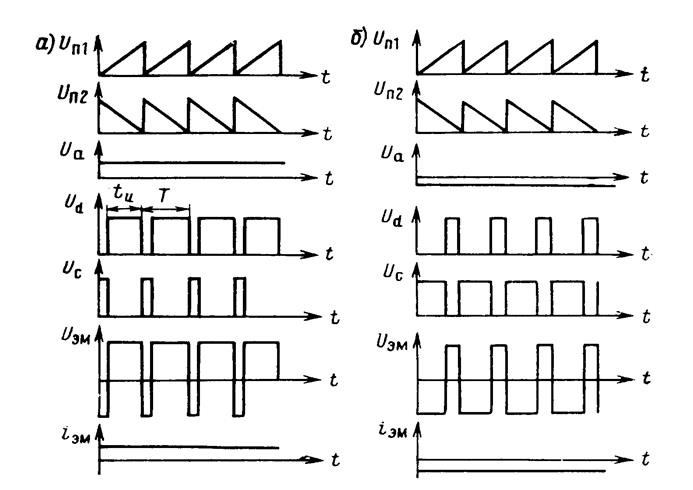
Рис. 2.8. Эпюры сигналов на элементах корректора.
Широтно-импульсный
модулятор и усилитель мощности можно
рассматривать как пропорциональное
звено. Положение штока центробежного тахометра l = l(ω,iэм), а 
Для режима синхронизации в управлениях корректора следует заменить переменную Ua на соответствующий сигнал, снимаемый с выхода активного синхронизатора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.