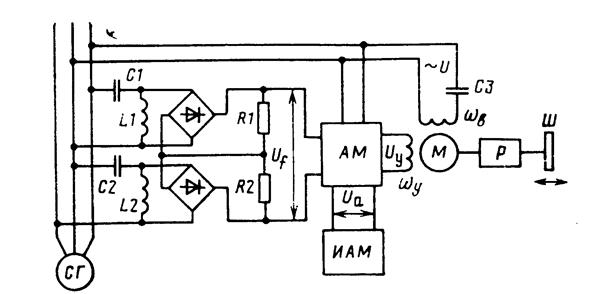
Рис. 2.4. Принципиальная схема корректора частоты вращения.
Формула (2.10) — уравнение апериодического звена. Для повышения точности стабилизации угловой скорости применяют корректоры частоты.
Уравнение корректора частоты. Измерительный орган корректора (рис. 2.4) состоит из двух резонансных контуров: L1C1, L2C2. Резонансная частота настройки первого контура несколько выше номинального значения стабилизируемой частоты fн, а частота настройки второго контура ниже номинального значения (рис. 2.5). Напряжения на индуктивных элементах Ll и L2 пропорциональны токам I1 и I2, протекающим по резонансным контурам, и, следовательно, напряжение, снимаемое с одинаковых, резисторов R1 и R2 (Uf) (см. рис. 2.4) будет пропорционально разности токов контуров I1 и I2. При небольших отклонениях от частоты fн разность токов линейно зависит от частоты, поэтому и напряжение на выходе измерительного органа будет пропорционально отклонению частоты генератора от fн:
![]() (2.11)
(2.11)
где k/ — коэффициент пропорциональности.
Сигнал Uf, поступает на магнитный усилитель AM, где он усиливается. Выход магнитного усилителя подключен к обмотке управления ωу конденсаторного асинхронного двигателя М, вторая обмотка которого ωв питается от синхронного генератора СГ через фазосдвигающий конденсатор СЗ. Конденсаторный двигатель через червячный редуктор Р воздействует на платформу Ш(см. рис. 2.3, поз. 9), изменяя тем самым степень сжатия пружины центробежного регулятора.
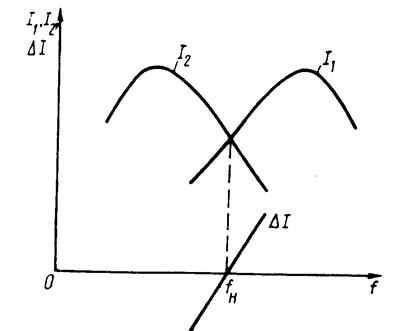
Рис. 2.5. Характеристики резонансных контуров корректора.
Корректор частоты также используется при параллельной работе синхронных генераторов. Для этого магнитный усилитель корректора имеет добавочную обмотку управления, на которую поступает сигнал Ua, пропорциональный отклонению активной мощности генератора от среднего значения активной мощности всех параллельно работающих генераторов. Этот сигнал формируется измерителем активной мощности ИАМ и подается на магнитный усилитель только при параллельной работе генераторов. Под действием сигнала Uа перемещается регулирующий орган привода (заслонке или наклонная шайба), в результате чего неравномерность загрузки генераторов активной мощностью уменьшается.
С учетом наличия двух управляющих сигналов на вход магнитного усилителя его уравнение в малых отклонениях имеет вид
![]() (2.12)
(2.12)
где Ту — постоянная времени магнитного усилителя; kу — коэффициент усиления по каналу регулирования частоты; kа — коэффициент усиления по каналу распределения активных нагрузок между параллельно работающими генераторами.
Приближенно можно считать, что угловая скорость ωд конденсаторного двигателя пропорциональна напряжению Uy на зажимах обмотки управления ωу магнитного усилителя:
![]() (2,13)
(2,13)
где kд — коэффициент пропорциональности.
Асинхронный двухфазный двигатель можно считать интегрирующим звеном, полагая, что
 (2.14)
(2.14)
Из уравнений (2.11)— (2.14) можно получить уравнение корректора относительно Δl. С учетом того, что Ту мало и им можно пренебречь,
или в относительных приращениях
![]() (2.15)
(2.15)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.