



Министерство образования Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЁТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ
Вариант 5, тема 9
|
По дисциплине __________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
Тема:
________________________________________________________________________
|
||||
|
||||
Автор: студент гр. _____ ____________________ /___________________/
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: _20.04.2004_
|
ПРОВЕРИЛ ст. преподаватель ______________ /________________/
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2004
отдельных точек механизма, включая центры масс звеньев.
отдельных точек механизма, включая центры масс звеньев.
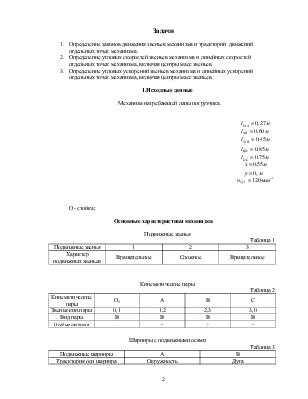
Механизм нагребающей лапы погрузчика.
О - стойка;
Таблица 1
|
Подвижные звенья |
1 |
2 |
3 |
|
Характер подвижных звеньев |
Вращательное |
Сложное |
Вращательное |
Таблица 2
|
Кинематические пары |
О1 |
А |
В |
С |
|
Звенья кин.пары |
0,1 |
1,2 |
2,3 |
3,0 |
|
Вид пары |
В |
В |
В |
В |
|
Особые свойства |
- |
- |
- |
- |
Таблица 3
|
Подвижные шарниры |
А |
В |
|
Траектория оси шарнира |
Окружность |
Дуга |
Построение
1.Плана положений механизма
План положений – графическое изображение взаимного расположения звеньев механизма, вычерченных в соответствии с законом движения входного звена и использованием линейного масштаба.
Построение плана положений механизма начинается с изображения неподвижных опор и направляющих с использованием линейного масштаба.
Масштабный коэффициент:
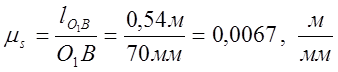 , где
, где ![]() - длина
звена АВ,
- длина
звена АВ,
О1В- чертежное изображение, равное 70 мм.
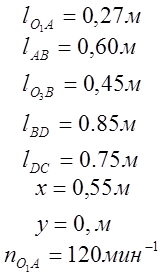
С использованием коэффициента определяем остальные длины:
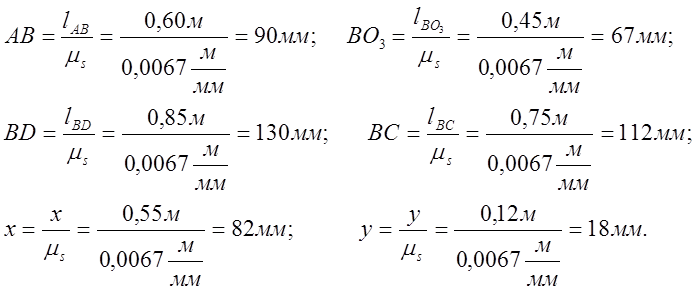
Изображаем траектории движения характерных точек механизма (подвижных шарниров). Определяем крайние положения механизма (начало холостого и рабочего хода). Т.к. рассматриваемый механизм является механизмом высадочного пресса, т.е. технологической машиной, то за начало отсчёта принимаем начало холостого хода.
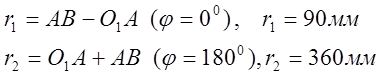
(.)A0-начало холостого хода и соответственно -
(.)А4- начало рабочего хода
Для определения характера движения звеньев механизма и его отдельных точек строим 8 положений механизма.
2.Построение планов скоростей механизма
План скоростей механизма – совокупность планов скоростей всех звеньев механизма.
План скоростей звена – пучок лучей, выходящий из 1 полюса, на который в едином масштабе изображаются абсолютные скорости точек звена механизма.
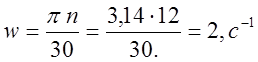
где w – угловая скорость ![]()
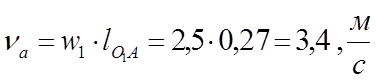
Определим линейную скорость (.) ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.