по курсу “Теория нелинейных и цифровых систем управления ”
Выполнил: студент группы СУ-91
Темченко С.А.
Проверил: Самедов Ю.Ф.
СУМЫ 2003
1. Постановка задачи для улучшения качества работы САР
САР с переменной структурой имеет следующий вид:
![]() – f
– f
![]()
![]()
![]()
|
|
 |
|||||||||||||||
 |
|||||||||||||||
– Uос
|
||||
![]()
![]()
![]()
Рис. 1. САР с переменной структурой.
Принцип САР с переменной структурой необходимо рассматривать в переходных процессах по заданию и по нагрузке с указанными регуляторами Рег1 и Рег2.
Переходные процессы по заданию и по нагрузке в САР с регуляторами Рег1, Рег2, а также в САР с переменной структурой приведены на рис. 2–7.
 Х Х
Х Х
 Хз
Хз
Хз
Хз
t t
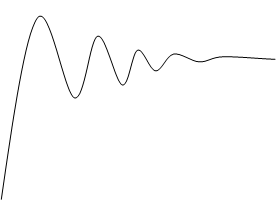
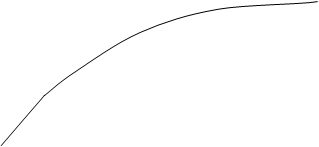
Рис.2. П/п в САР с Рег1 по заданию Рис.3. П/п в САР с Рег2 по заданию
![]()
![]() Х Х
Х Х
 |
![]()
![]() Хз Хз
Хз Хз
t1 t t
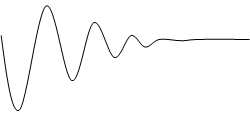
Рис.4. П/п в САР с переменной структурой по заданию Рис.5. П/п в САР с Рег1 по нагрузке
![]() Х
Х ![]() Х
Х
![]()

 Хз
Хз
Хз
Хз
t1 t t
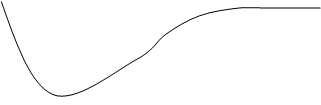
Рис.6. П/п в САР с переменной структурой по заданию Рис.7. П/п в САР с Рег2 по нагрузке
Принцип САР с переменной структурой заключается в следующем:
при большой ошибке рассогласования выбирают структуру САР с регулятором, который обеспечивает быстрое сведение ошибки рассогласования к нулю (рис.5). Однако при таком регуляторе переходные процессы в системе носят сильно колебательный характер, в результате чего являются очень продолжительными, с большими перерегулированиями, переходными процессами. При других регуляторах переходные процессы имеют апериодический вид (рис.7), в результате чего удается избежать больших перерегулирований, но процесс остается затянутым по времени.
В САР с переменной структурой при больших ошибках рассогласования работает первый регулятор, а при подходе выходной величины к заданному значению – второй. В результате переходный процесс получается без перерегулирований и заканчивается за минимальное время (рис.6).
Так как небольшие изменения всегда есть в реальных системах, то переключение с Рег2 на Рег1 надо производить, если отклонение от заданного значения существенно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.