|
Техническое описание работы комплекса управления роботами-манипуляторами МП-9 и МП-11. Комплекс полностью разработан для УУ ЭЦПУ-6030, МПЦУ-2-32-1 и для аппаратного комплекса на базе IBM PC XT. Изначально стенд проектировался как специализированный объект управления, предназначенный для практического изучения программной обработки сигналов микропроцессорными системами управления (МПСУ) для специальности 210300. Однако после создания стенда можно с уверенностью сказать о том, что это отличное пособие для изучения принципа работы электрической, электронной, пневматической и механической части робототехнических комплексов и автоматизированного оборудования для всех специальностей технического профиля нашего университета. |
|
Для программной обработки сигналов в самом общем случае можно использовать любой язык программирования (от Ассемблера, Basic до Visual C++), чтобы освоить общие принципы создания практических алгоритмов обработки сигналов и выдачи команд МПСУ.
Особенностью данной УИЛПР является универсальность ее демонстрации, возможность работы с устройствами управления разных поколений:
Причем гибкость данного аппаратно-программного комплекса УИЛПР такова, что можно работать одновременно на разных УУ, с разными манипуляторами, как в ручном (пошаговом), так и в автоматическом режиме. Конфигурация УИЛПР настраивается за 5-7 минут.
Аппаратная часть состоит из:
1. Стенд, в состав которого входят манипуляторы МП-9 и МП-11, представляет собой комплекс, включающий в себя манипуляторы, соединённые пневмопроводом с устройством подготовки воздуха (УПВ) и кабелями с УУ.
В манипуляторе на каждое движение кроме схвата установлено по 2 электропневматических клапана.
На электроклапаны манипулятора подаётся управляющее напряжение постоянного тока =24В от УУ. Сжатый воздух подаётся к электропневматическим клапанам манипулятора от лабораторной пневмомагистрали через УПВ, который обеспечивает регулировку необходимого давления, подачу воздуха и смазки в пневмоцилиндры
Последовательность и количество движений манипулятора в соответствии с принятой технологической схемой устанавливается вводом программы с пульта УУ. Сигнал о выполнении каждого движения манипулятора выдают конечные микропереключатели и КЭМы, при подходе к ним постоянных магнитов, установленных на подвижных частях.
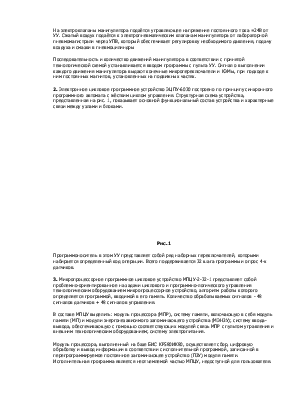
2. Электронное цикловое программное устройство ЭЦПУ-6030 построено по принципу синхронного программного автомата с жёстким циклом управления. Структурная схема устройства, представленная на рис. 1, показывает основной функциональный состав устройства и характерные связи между узлами и блоками.
Рис. 1
Программоноситель в этом УУ представляет собой ряд наборных переключателей, которыми набирается определенный код операции. Всего поддерживается 32 шага программы и опрос 4-х датчиков.
3. Микропроцессорное программное цикловое устройство МПЦУ-2-32-1 представляет собой проблемно-ориентированное на задачи циклового и программно-логического управления технологическим оборудованием микропроцессорное устройство, алгоритм работы которого определяется программой, вводимой в его память. Количество обрабатываемых сигналов - 48 сигналов датчиков + 48 сигналов управления.
В составе МПЦУ выделить: модуль процессора (МПР), систему памяти, включающую в себя модуль памяти (МП) и модули энергонезависимого запоминающего устройства (МЭНЗУ); систему ввода-вывода, обеспечивающую с помощью соответствующих модулей связь МПР с пультом управления и внешним технологическим оборудованием; систему электропитания.
Модуль процессора, выполненный на базе БИС КР580ИК80, осуществляет сбор, цифровую обработку и вывод информации в соответствии с исполнительной программой, записанной в перепрограммируемое постоянное запоминающее устройство (ПЗУ) модуля памяти. Исполнительная программа является неотъемлемой частью МПЦУ, недоступной для пользователя. Управляющая программа - программа, написанная пользователем в кодах команд входного языка МПЦУ и обеспечивающая выполнение заданного алгоритма управления внешним оборудованием.
Пульт управления (ПУ) совместно с модулем управления (МУ) составляют технические средства общения оператора с МПЦУ. ПУ включает в себя клавиатуру для ввода команд и управления режимом работы МПЦУ, однострочный дисплей, предназначенный для отображения контролируемой оператором информации и индикаторы режимов работы. МУ обеспечивает сопряжение клавиатуры и индикации ПУ с внутренней магистралью обмена информацией МПЦУ.
Модули ввода (МВВ) и вывода (МВЫВ) дискретных сигналов предназначены для связи МПЦУ с внешним технологическим оборудованием. Они обеспечивают преобразование уровней, гальваническую развязку сигналов, а также индикацию состояния каждого входа и выхода МПЦУ.
4. Блок интерфейса и УСО (устройств сопряжения с объектом) - авторская разработка. Он редставляет собой самостоятельный аппаратный комплекс, выполненный на базе МПЦУ-2-32-1, из состава которого использованы готовые модули МВВ и МВыв, корпус и блок питания. В данной конфигурации может обрабатываться 128 сигналов управления (64 на ввод и 64 на вывод).
Модуль интерфейса поддерживает работу с ЭВМ IBM PC по параллельному порту.
Такой подход особенно удобен при создании систем с открытой архитектурой управления и имеет ряд очевидных преимуществ перед использованием последовательного порта:
Главная страница
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

 Рудученко
С.Г.
Рудученко
С.Г. 