Содержание:
5.1. Общие сведения о натяжных устройствах……………………………..…
5.2. Оборудование отвально-конвейерного комплекса………………………
5.2.1. Управление комплексом………………………………………………
5.2.2. Принцип работы отвально-конвейерного комплекса…………….
5.3. Тяговый расчет наклонного конвейера……………………………………
5.3.1. Определение сил сопротивления движению на
характерных участках наклонного конвейера……………………
5.3.2. Условия отсутствия пробуксовки на приводных барабанах……
5.3.3. Условия отсутствия чрезмерного провеса ленты
между роликоопорами……………………………………………….
5.3.4. Определение максимальной величины натяжной ленты………
5.3.5. Расчет прочностных параметров ленты…………………………..
5.3.6. Определения усилия натяжного барабана наклонного
конвейера………………………………………………………………
5.4. Тяговый расчет магистрального конвейера………………………………
5.4.1. Определение сил сопротивления движению на
характерных участках контура магистрального конвейера…….
5.4.2. Условия отсутствия пробуксовки на приводных барабанах…....
5.4.3. Условия отсутствия чрезмерного провеса ленты
между роликоопорами………………………………………………
5.4.4. Определение сил сопротивления величины натяжной ленты...
5.4.5. Расчет прочностных параметров ленты…………………….…….
5.4.6. Определение сил сопротивления движению на
характерных участках контура магистрального конвейера…..
5.4.7. Определение сопротивления блоков полиспастной
системы натяжного устройства…………………………………….
5.5. Пуск магистрально конвейера с
пневмогидравлическими аккумуляторами………………………………
Литература…………………………………………………………………………..
5. Специальная часть.
5.1. Общие сведения о натяжных устройствах.
Натяжные устройства предназначаются для натяжения ленты, обеспечивающие тяговое усилие на проводе и ограничения провеса ленты между роликоопорами.
По принципу действия их разделяют на неавтоматические (жесткие) и автоматические. Неавтоматические (жесткие) натяжные устройства (рис. 5.1.) характеризуется постоянным или периодически изменяемым положением натяжного барабана в процессе работы конвейера.
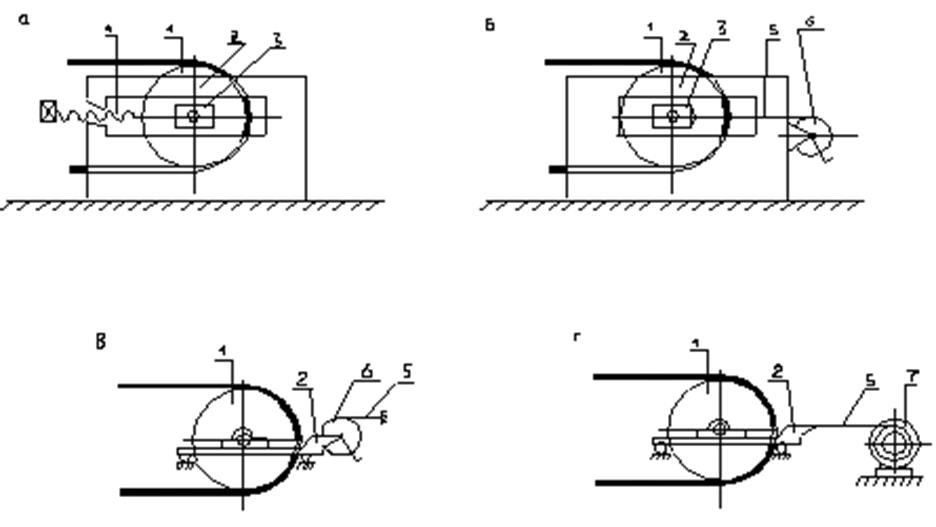
Рис.5.1. Схемы неавтоматических ( жёстких ) натяжных устройств;
а - винтовая; б - с ручной лебёдкой и неподвижной рамой; в - с ручной лебёдкой и подвижной рамой; 1 - натяжной барабан; 2 - рама; 3 - башмак, перемещающийся по раме; 4 - винт; 5 - канат; 6 - ручная лебёдка; 7 - эклектическая лебёдка.
Имеются две основных типа конструкции неавтоматических устройств: в первом (рис. 5.1., а, б) при создании натяжного усилия барабан передвигается по направляющим неподвижной раны, во втором (рис. 5.1., в, г) передвигается натяжная каретка (барабан вместе с рамой). Передвижение осуществляется канатами с помощью винтовых передач, ручных или электрических лебедок. Лебедки обычно оснащают динамометрами датчиками дистанционного контроля натяжения, что позволяет оператору установить предварительное натяжение ленты с предельной точностью. Достоинствами этих устройств являются протоки и компактность конструкции, нечувствительности к загрязнению, надежность в работе; недостатками - ослабление натяжения ленты в процессе работы из-за упругих и остаточных деформаций ее, что может вызвать ослабление натяжения ленты и проскальзывание ее по приводному барабану. Поэтому ленте, как правило, сообщается завышенное натяжение, что приводит к сокращению срока ее службы.
К достоинствам автоматических натяжных устройств следует отнести осуществляемый или рациональный режим натяжения ленты и автоматическую компенсацию упругой и остаточной вытяжки. Недостатками являются: сложность и большие размеры конструкции, чувствительность к загрязнению, необходимость дополнительного вспомогательного привода.
Автоматическое натяжное устройство (АНУ) представляет собой систему автоматического регулирования (рис 5.2), состоящую из привода, передачи, рабочего органа (натяжной каретки) и блока управления. Натяжение сбегающей ветви ленты Sсб , измеряемое датчиками натяжения, сравнивается с сигналом задающего устройства, которое настроено на заданное натяжение Sс.з., либо получает и трансформирует сигнал от датчика натяжения набегающей ветви Sиб. Усиленный сигнал, соответствующий определённой разности Sсб - Sс.з., управляет приводом натяжного устройства .
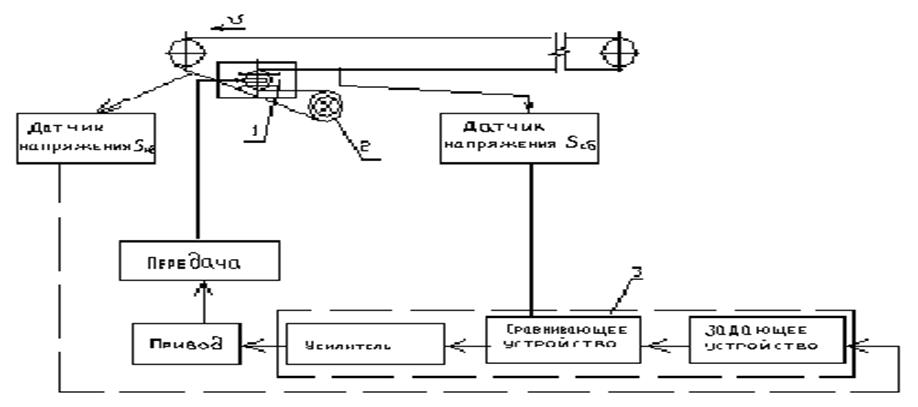
Рис.5.2. Структурная схема автоматического натяжного устройства:
1 - тележка с натяжным барабаном, 2 - приводной барабан конвейера; 3 - блок управления.
Автоматическое натяжные устройства разделяют :
а) по принципу действия на устройства непрерывного и периодического
действия;
б) в зависимости от числа управляемых параметров на устройства с
управлением по одному, двум и трём параметрам, к которым относится
натяжения Sнб и Scб, тяговое усилие W0, скорость движения
ленты ![]() , и
, и
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.