– двухконтурная гидросистема с насосом, автоматически
изменяющим расход масла в соответствии с уровнем нагрузки
в гидроприводе исполнительных механизмов;
– система смазки обеспечивает постоянную подачу консистентной смазки в ответственные узлы трения;
– система орошения дополнительно выполняет функцию охлаждения гидросистемы и электродвигателя исполнительного органа;
– пульт управления с возможностью проведения электронной диагностики отказов;
– комбайн может дополнительно оснащаться навесным ленточным перегружателем, позволяющему комбайну передвигаться на длину до 20 м без передвижения хвостовой секции ленточного конвейера.
3. Описание кинематической схемы проходческого комбайна
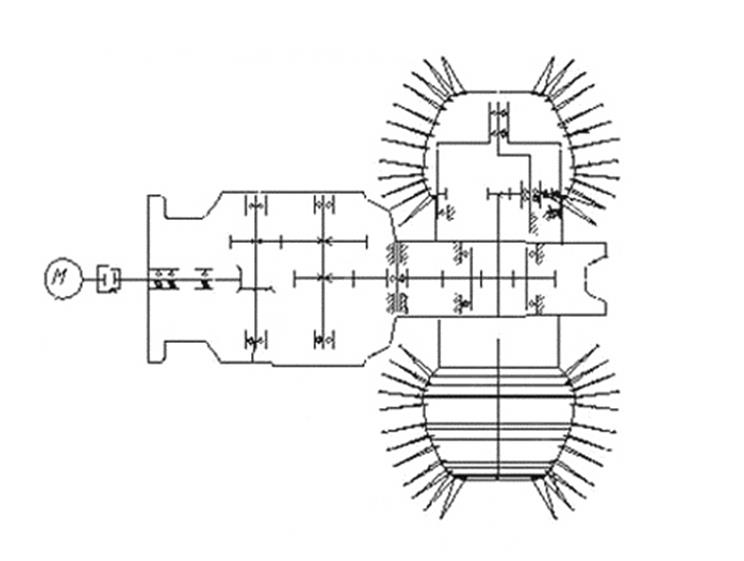
Кинематические схемы отдельных узлов проходческого комбайна представлены на рис. 3.1 и на рис. 3.2.
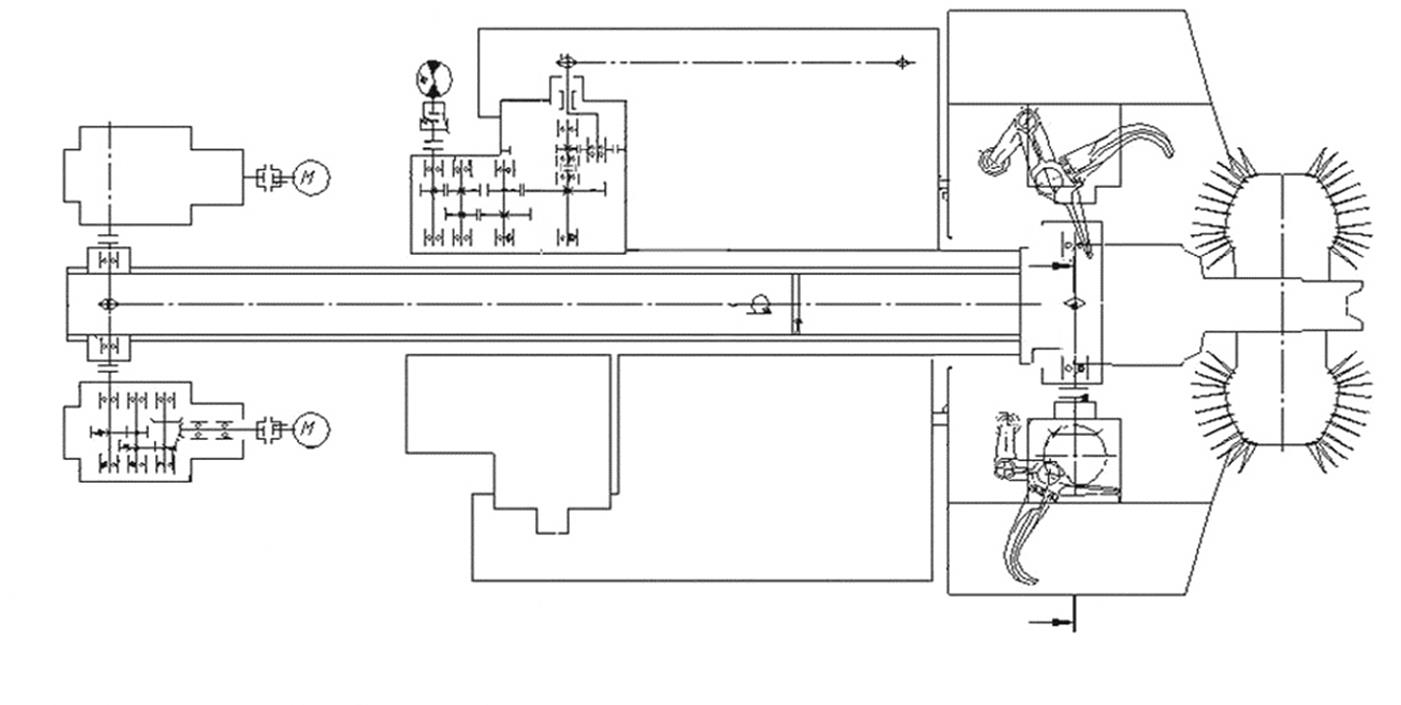
Рис. 3.1. Кинематическая схема отдельных узлов проходческого комбайна
 |
 |
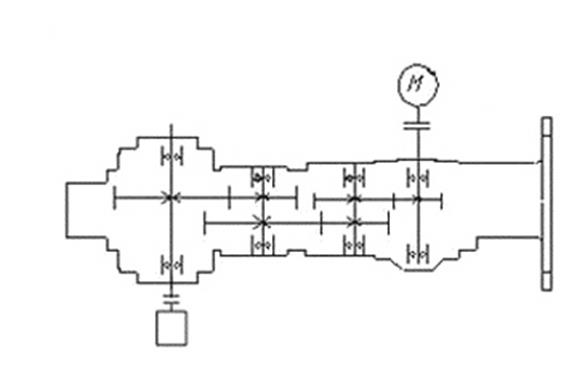
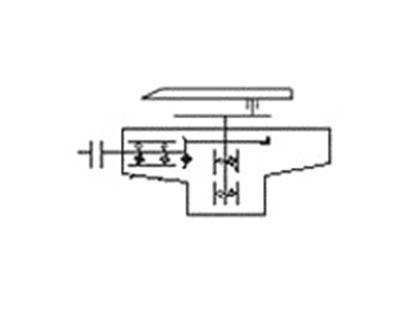
Рис. 3.2. Кинематическая схема
отдельных узлов
проходческого комбайна
Общая кинематическая схема включает в себя пять отдельных кинематических схем модульных механизмов и узлов.
Редуктор исполнительного органа (рис. 3.2, а) обеспечивает
передачу крутящего момента от электродвигателя 1 (AKB250L4Г,
P = 150 кВт; n = 1500 об/мин) через втулочную
муфту 2
на коническую вал-шестерню 6 (m = 6; z = 16),
которая опирается
в расточках корпуса на подшипники 3, 4, 5 и входит в зацепление
с коническим зубчатым колесом 7 (m = 6; z = 34).
Через коническое зубчатое колесо 7 вращение получает вал 8 с шестерней 9 (m = 5;
z = 41). Вал 8 опирается на два
подшипника 10, размещенных
в расточках корпуса. Через шестерню 9 вращение получает зубчатое колесо 11 (m = 5; z = 46) и вал-шестерня 12 (m = 8; z = 16), установленная на двух подшипниках 13. Далее через промежуточное
зубчатое колесо 14 (m = 8; z = 45), опирающееся на неподвижную ось 15 через подшипник 16,
вращение передается на приводное зубчатое колесо 17 (m = 8; z = 39), внутри которого встроена зубчатая муфта 18 (m = 6; z = 16). Зубчатое колесо 17 опирается на разъемный
корпус редуктора через два подшипника 19. Зубчатая муфта 18 через шлицевое
соединение вращает вал 20, к торцам которого жестко прикреплены две солнечные
шестерни 21 (m = 6; z = 16) двух планетарных редукторов
аксиальных коронок 22. Каждая солнечная шестерня 21 через три сателлита 23 (m = 6; z = 23) приводят
во вращение зубчатый венец 24 (m = 6; z = 62), а
сами сателлиты установлены на неподвижных осях водила 25 с подшипниками 26.
Каждый зубчатый венец 24 жестко прикреплен к корпусу аксиальной коронки и
опирается на центральную неподвижную ось водила 25 через подшипник 27 и
подшипник 28. Забойная консоль 29 корпуса редуктора образует вторую опору с
корпусом аксиальной коронки через подшипник 30.
Редуктор хода (рис. 3.1) обеспечивает передачу
вращательного движения от гидромотора 1 на приводную звездочку 26 траковой
гусеничной тележки 27 через пятиступенчатые зубчатые передачи.
Вал гидромотора через муфту тормозную гидравлическую 2, зубчатую муфту 3 вращает
вал 4, установленный на двух подшипниках 5, и шестерню 6 (m = 2,5; z = 17). От шестерни 6 вращение получает зубчатое
колесо 7 (m = 2,5; z = 58), с валом 8
и шестерней 9 (m = 3,5; z = 15), которая кинематически
связана
с зубчатым колесом 10 (m = 3,5; z = 15)
второй ступени передачи.
В результате
вращение получает вал 11 с шестерней 12 (m = 3,5; z = 64), которая входит в зацепление с зубчатым колесом 13 (m = 5; z = 56) жестко посаженным на вал 14, который опирается
на подшипники 15
и 16, установленные в расточках корпуса редуктора хода. Вал 11 опирается на
корпус редуктора через подшипники 29 и 30.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.